Rodzaje przekładni mechanicznych, Obliczenia przełożenia
Rodzaje przekładni mechanicznych, Obliczenia przełożenia
Jeśli jesteś inżynierem ⚙, który szczególnie zajmuje się projektowaniem nowych rozwiązań technicznych (my na przykład często projektujemy wynalazki dla naszych klientów: zobacz więcej o projektowaniu wynalazków to pewnie często zastanawiasz się jaką przekładnie dobrać albo jak obliczyć przełożenie w danej przekładni? W tym artykule przedstawię Ci czym są przekładnie mechaniczne i jaką pełnią rolę w budowie maszyn. Znajdziesz też listę rodzajów przekładni oraz sposób określania ich przełożenia (jak liczyć przekładnie).
Zapraszam do lektury i do zobaczenia tego krótkiego filmu w ramach inżynieryjnej inspiracji:
Co to jest przekładnia mechaniczna? 🤔

Przekładnie mechaniczne aktualnie znajdują się obecne praktycznie w każdej maszynie, urządzeniu czy nawet w gadżecie. Nasze biuro projektowo – wynalazcze CSTNG.pl bardzo często wykorzystuje różnego rodzaju przekładnie (szczególnie przekładnie zębate) w projektowanych przez nas wynalazkach lub wzorach użytkowych (zobacz: projektowanie wynalazków na zlecenie). Można więc przypuszczać, że pełnią one bardzo istotne funkcję.
Do czego służą przekładnie mechaniczne?
Przekładnie mechaniczne to mechanizmy, za pośrednictwem których jesteśmy w stanie przenosić energię, przy jednoczesnej zmianie prędkości i momentu. Dodatkowo umożliwiają one zmianę kierunku ruchu obrotowego i dopasowania go do naszych potrzeb. Przekładnie pozwalają również na przenoszenie energii na odległość, co w nie jednym projektowanym przez nas wynalazku dla klientów rozwiązało to problem konstrukcyjny. Kolejną bardzo pomocną funkcją jest możliwość zmiany rodzaju ruchu: z obrotowego na liniowy i odwrotnie. W bardziej złożonych mechanizmach zastosowanie kilku przekładni pozwala również na sterowanie prędkością obrotową i momentem.
Przykład połączenia kilku przekładni mechanicznych: skrzynia biegów

A więc reasumując – najważniejsze funkcję przekładni mechanicznych to:
- Przenoszenie energii na odległość wraz ze zmianą prędkości kątowej i momentu obrotowego,
- Zmiana kierunku obrotów,
- Możliwość dopasowania obrotów / momentu do potrzeb,
- Zmiana rodzaju ruchu z obrotowego na liniowy i odwrotnie
Co to jest przełożenie przekładni mechanicznej?
Przełożenie jest podstawowym i wyjściowym parametrem charakteryzującym przekładnie. Możemy je podzielić na trzy typy, w zależności od wielkości, za pomocą których obliczamy to przełożenie. Wyróżnia się:
- Przełożenie geometryczne
- Przełożenie kinematyczne
- Przełożenie dynamiczne
Przełożenia te są od siebie całkowicie zależne. Wynikają z odpowiednich przekształceń wzorów. Jednakże w zależności od przekładni, potrzeb, opracowywanego projektu, czy komunikacji projektantów z klientem używa się ‘wygodniejszych’ parametrów.
Warto też wspomnieć, że przełożenie to parametr, który nie posiada żadnej jednostki – jest to wartość bezwymiarowa – zwykła liczba. W zależności od jej wartości przekładnie pracują na dwa różne sposoby. Jako tak zwane reduktory bądź multiplikatory.

Wzór na przełożenie geometryczne
Do określenia przełożenia geometrycznego przekładni oblicza się stosunek parametrów geometrycznych kół: napędzającego i napędzanego. Parametrami tymi mogą być średnice podziałowe w przypadku kół zębatych, bądź skuteczne w przypadku kół pozbawionych zębów. Zapis wygląda następująco:

przy czym:
d1 – średnica koła napędzającego przekładni (wału napędowego)
d2 – średnica koła napędzanego przekładni (wału napędzanego)
Przełożenie geometryczne tworzy również stosunek liczby zębów poszczególnych kół zębatych przekładni. Taki stosunek bardzo często stosuje się w przypadku, gdy mamy do czynienia z przekładniami zębatymi:

przy czym:
z1 – ilość zębów na kole zębatym napędzającym przekładni (wał napędowy)
z2 – ilość zębów na kole zębatym napędzanym przekładni (wał napędzany)
Wzór na przełożenie kinematyczne
Przełożenie kinematyczne tworzy stosunek prędkości kątowej bądź obrotowej (to dwa różne parametry) koła napędzającego do prędkości kątowej koła napędzanego, czyli:

przy czym:
ω1 – prędkość kątowa koła napędzającego przekładni (wału napędowego)
ω2 – prędkość kątowa koła napędzanego przekładni (wału napędzanego)
Analogicznie w/w stosunek prędkości kątowych przekładni można zastąpić stosunkiem prędkości obrotowych (wynika z podstawowych wzorów mechaniki klasycznej) tj.:

przy czym:
n1 – prędkość obrotowa koła napędzającego przekładni (wału napędowego)
n2 – prędkość obrotowa koła napędzanego przekładni (wału napędzanego)
Wzór na przełożenie dynamiczne
Przełożenie dynamiczne to stosunek momentu obrotowego na kole napędzającym do momentu obrotowego występującego na kole napędzającym, co zapisuje się jako:

przy czym:
M1 – moment obrotowy koła napędzającego przekładni (wału napędowego)
M2 – moment obrotowy koła napędzanego przekładni (wału napędzanego)
Reduktor, a multiplikator 🤓

Aby przekładnia pracowała jako reduktor przełożenie musi spełniać warunek: przełożenie i > 1. Oznacza to, że w przekładniach – reduktorach prędkość kątowa koła zębatego (wału) napędowego jest większa od prędkości kątowej koła zębatego (wału) napędzanego. Ostatecznie można zatem powiedzieć, że prędkość kątowa na ‘wyjściu’ (wale napędzanym) maleje. Z drugiej strony na wyjściu dochodzi do wzrostu wartości momentu. Redukcja wspomnianej prędkości na wyjściowym wale sprawia, że właśnie dlatego taki układ nazywamy reduktorem.
W przypadku, gdy i < 1 mamy do czynienia z przekładnią pracującą jako multiplikator. Analogicznie mówiąc: oznacza to, że w przekładniach – multiplikatorach prędkość kątowa koła zębatego (wału) napędowego jest mniejsza od prędkości kątowej koła zębatego (wału) napędzanego. Ostatecznie można zatem powiedzieć, że prędkość kątowa na ‘wyjściu’ (wale napędzanym) rośnie. Z drugiej strony na wyjściu dochodzi do zmniejszenia wartości momentu. Multiplikacja (zwiększenie) wspomnianej prędkości na wyjściowym wale sprawia, że właśnie dlatego taki układ nazywamy multiplikatorem.
Rodzaje przekładni i ich przełożenie
Istnieje wiele rodzajów przekładni mechanicznych. Każde z nich różnią się elementami składowymi, kształtami lub umiejscowieniem jednego elementu względem drugiego. To niesamowite, jak ludzka pomysłowość nie zna granic, bo to dzięki niej i różnym kombinacjom geometrii elementów mamy dostępne tyle ciekawych rozwiązań konstrukcyjnych w postaci przekładni. Oczywiście nadal są opracowywane i chronione prawnie coraz to nowsze, zwiększające sprawność wynalazki lub wzory użytkowe, będące przekładniami – zobacz ochrona prawna pomysłów: rozwiązań technicznych .
Przekładnie mechaniczne cierne – obliczenie przełożenia i zasada działania
Pierwszym rodzajem przekładni, które chciałbym omówić to przekładnie cierne. Są to przekładnie, w której elementy są dociskane w taki sposób, aby pomiędzy nimi wytworzyła się odpowiednia siła tarcia, za pośrednictwem której przekazywany jest ruch. Popatrzmy na rysunek wyjaśniający sytuację:

W omawianym przypadku mamy dostępne dwa koła 1 i 2. Koło pierwsze (1) obracając się, przy odpowiednim docisku w prawo tworzy siłę tarcia na powierzchni styku koła drugiego (2), dzięki czemu uzyskujemy ruch obrotowy na kole drugim (2). Przełożenie takiej przekładni określa się np. przez stosunek średnic kół.
Przekładnie mechaniczne cięgnowe – obliczenie przełożenia i zasada działania
Drugą rodziną przekładni, od której zacznę to przekładnie cięgnowe. Są to przekładnie mechaniczne, dzięki którym jesteśmy w stanie oddalić na pewną odległość oś napędzającą od osi napędzanej. Tą zaletę uzyskujemy dzięki zastosowaniu elementu pośredniczącego między jednym kołem, a drugim. Element ten nazywa się cięgnem. Cięgnem może być kilka elementów, a rodzaj jaki zastosujemy definiuję dokładnie rodzaj przekładni cięgnowej.
Przekładnie cięgnowe w zależności od rodzaju użytego cięgna dzielą się na:
- przekładnie pasowe
- przekładnie łańcuchowe
- przekładnie linowe
Przekładnie mechaniczne pasowe
Powszechnym rozwiązaniem jest zastosowanie cięgna jako pasek elastyczny, o różnych kształtach. Opasa się nim wszystkie koła jakie tworzą nam przekładnie, a ruch obrotowy kół napędzanych otrzymujemy dzięki sile tarcia występującej pomiędzy powierzchnią paska, a opasanego koła, co zostało pokazana na poniższym rysunku:

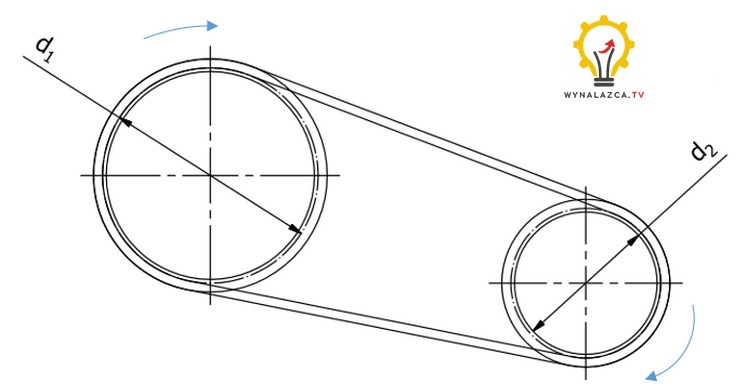
Przełożenie teoretyczne możemy określić jako stosunek prędkości kątowej koła napędowego do napędzanego. W naszej przekładni przełożeniem jest stosunek np. prędkości kątowej koła 1 do koła 2, czyli:
Bądź wykorzystując średnice skuteczne:
Sprawność przekładni pasowych
Nie bez powodu podkreśliłem, że wyżej wymienione wzory dotyczą przełożenia teoretycznego. Przełożenie rzeczywiste ma inną wartość względem przełożenia teoretycznego. Wynika to ze strat mechanicznych układu. W przekładniach pasowych akurat jest tak, że straty te są spowodowane powszechnie występującym poślizgiem pasa po powierzchni roboczej opasanego koła. Powoduje to, że sprawność naszej przekładni jest w porównaniu do innego rodzaju przekładni dosyć niska. ☹ Warto o tym wiedzieć.
Przekładnie mechaniczne pasowe zębate
W przekładniach cięgnowych nie tylko stosuje się paski elastyczne, ale też zębate. Takie rozwiązanie zwiększa sprawność. Przełożenie uzyskuje się dzięki zazębianiu się zębów paska z zębami kół, a wartość przełożenia określa się tak samo, jak w przypadku pasków elastycznych. Taką przekładnię prezentuję poniższy rysunek:


Przekładnie mechaniczne cięgnowe łańcuchowe
Kolejnym elementem, który może być wykorzystany jako cięgno to łańcuch. Takie rozwiązanie definiuje, że przekładnia nosi nazwę przekładni łańcuchowej. W takim rozwiązaniu mamy do dyspozycji koła zębate, a kształt ich zębów jest specjalnie wykonany tak, aby zazębiały się z ogniwami łańcucha jednocześnie przenosząc napęd. Zaletą przekładni łańcuchowych jest fakt, że pracują one bez poślizgu, co znacznie zwiększa sprawność. Do obliczenia przełożenia przekładni łańcuchowych stosuje się takie same wzory, jak zostało to opisane dla przekładni cięgnowych pasowych.
Warto jednak zaznaczyć, iż występowanie zębów na kołach umożliwia zastosowanie dodatkowego wzoru:

Przekładnie mechaniczne cięgnowe linowe
Ostatnim rodzajem przekładni cięgnowych, o którym wspomniałem były przekładnie cięgnowe kablowe. Idea takich przekładni polega na tym, że elementem cięgnowym jest lina (kabel). Przekładnie tego typu nie są tak powszechnie używane, jak inne rozwiązania, jednak często znajdują zastosowanie w różnego rodzaju urządzeniach elektrycznych, w których wymagana jest duża kompaktowość lub specjalne zastosowania np. w opisanych przez nas 🤖 robotach haptycznych 🤖 (zobacz: co to jest haptyka)

Przekładnie mechaniczne zębate – obliczenie przełożenia i zasada działania
Kolejnym typem przekładni są przekładnie mechaniczne zębate, w których główną rolę odgrywają elementy uzębione, takie jak koła zębate, czy w szczególnym przypadku listwy zębate. Co ważne przekładnie te pracują w kilku konfiguracjach, które wpływają m.in. na kierunek ruchu obrotowego oraz całkowitą sprawność mechanizmu przekładni.
Jednym z rodzajów przekładni zębatych to przekładnie mechaniczne walcowe, które zostały przedstawione na rysunku obok:

Odległość osi pomiędzy kołami przekładni zębatej
Schematycznie przekładnie zębate można przedstawić w następujący sposób:

Jak widać przekładnie tworzą proste walcowe koła zębate, których praca opiera się na zazębianiu się poszczególnych kół zębatych. Przekazywanie ruchu obrotowego w tym przypadku nie odbywa się na zbyt dużych odległościach. Dlaczego? Fakt ten bierze się z prostej zależności na odległość osi obrotu kół wchodzących w skład przekładni:
przy czym:
a – odległość pomiędzy osiami kół zębatych przekładni zębatej
d1 – promień pierwszego koła zębatego przekładni zębatej
d2 – promień drugiego koła zębatego przekładni zębatej
Zatem nie trudno się domyślić, że jeśli chcemy przekazywać ruch na większą odległość za pomocą przekładni zębatej walcowej to trzeba do tego dużych promieni kół, co zwiększa jej gabaryty. Stąd też ten rodzaj przekładni stosuje się do pracy na krótszych odległościach międzyosiowych.
Obliczenie przełożenia przekładni zębatej
Przekładnie są bardzo powszechnym mechanizmem, stosowanym w prawie każdym mechanicznym urządzeniu. Często też się stosuje jako jeden ze stopni przekładni wielostopniowych (złożonych z kilku rodzajów przekładni).
Przełożenie przekładni jednostopniowych oblicza się korzystając ze wszystkich w/w wzorów na przełożenie: stosunek liczby zębów kół, średnic podziałowych, momentów obrotowych, prędkości kątowych lub prędkości obrotowych
Przełożenie przekładni wielostopniowych oblicza się ze specjalnych wzorów, jednakże jest to temat na inny artykuł, który niebawem się pojawi ☺
Przekładnie mechaniczne zębate o zazębieniu wewnętrznym
Ciekawym przypadkiem jest rozwiązanie, w którym jedno z kół wchodzących w skład przekładni mechanicznej jest wyposażone z uzębienie wewnętrzne, co pokazano na rysunku poniżej.

Koła takie w praktyce mogą pracować na dwa sposoby: ich osie obrotu mogą być sztywne (nieruchome) lub ruchome. W przypadku, gdy jedna z osi jest ruchoma oznacza to, że po wprowadzeniu w ruch obrotowy jedno koło obiega drugie. Wówczas koło ruchome nazywa się satelitą, a koło nieruchome kołem centralnym.
Satelita jest wprawiona w ruch złożony, powstający z połączenia ruchu obrotowego wokół własnej osi i ruchu obrotowego wokół osi nieruchomego koła centralnego. Więcej na ten temat możesz znaleźć w dalszej części tego artykułu, gdy zostały omawiane przekładnie planetarne (obiegowe), których praca opiera się właśnie na ruchu satelity.
Przekładnie mechaniczne zębate stożkowe
Kolejnym rozwiązaniem jest zastosowanie kół stożkowych. Wówczas przekładnię zębatą można nazwać przekładnią stożkową. :

Schemat takiej przekładni został przedstawiony poniżej:

Taka konfiguracja jest stosowana przeważnie w sytuacjach, gdzie zależy nam na przekazywaniu ruchu obrotowego pod kątem (najczęściej 90 stopni) tzn. gdy oś obrotu jednego koła jest nierównoległa (prostopadła) do osi koła drugiego zębatego.
Przełożenie przekładni zębatych stożkowych oblicza się tak samo, jak przełożenia zwykłych przekładni zębatych.
Przekładnie mechaniczne zębate ślimakowe
Ciekawym rozwiązaniem, które również umożliwia przekazywanie ruchu pod kątem, jest przekładnia ślimakowa. Schemat przekładni ślimakowej został pokazany na poniższym rysunku:

Mechanizm taki składa się z ślimaka, który tworzy nagwintowany wałek gwintem trapezowym oraz ślimacznicy – odpowiednio uzębionego koła zębatego. Osie wymienionych elementów są do siebie prostopadłe, co powoduję, że przekładnia przenosi ruch obrotowy z jednej płaszczyzny, do drugiej pod kątem 90 stopni.

Przełożenie przekładni ślimakowej
Przełożenie przekładni ślimakowych oblicza się tak samo, jak przełożenia zwykłych przekładni zębatych.
Należy pamiętać jednak, że jeśli chodzi o liczbę zębów na ślimaku to bierze się pod uwagę jego liczbę zwojów (przeważnie jest to jeden zwój, a więc jeden ząb). Wynika z tego, że stosując przekładnie ślimakową możemy uzyskać bardzo duże albo bardzo małe wartości przełożenia (w zależności od tego co jest wejściem, a co wyjściem).
PRZYKŁAD: Jeśli ślimak jest wyposażony w jeden zwój, a jego ruch obrotowy jest przekładany na ruch obrotowy ślimacznicy o 80 zębach to wówczas przełożenie mamy równe 80, co jest dość dużą wartością.
Przekładnie mechaniczne zębate listwowe
Kolejnym rodzajem przekładni zębatej jest przekładnia zębata listwowa, za pomocą której jesteśmy w stanie zamienić ruch obrotowy koła zębatego na ruch liniowy listwy zębatej i odwrotnie. Konstrukcję takiego mechanizmu prezentuje poniższy rysunek:

Skok takiej przekładni jest definiowany przez długość listwy, co powoduję, że im dłuższy wysuw chcemy mieć, tym większe są gabaryty przekładni. Mechanizm ten stosuje się np. do napędów bram przesuwnych.
Obliczenie przełożenia przekładni zębatej listwowej
Kwestia przełożenia w tej przekładni jest bardzo ciekawa… Listwę zębatą uważa się za koło zębate o nieskończenie dużej średnicy. Zakładając, że listwa (1) jest elementem napędzającym koło zębate (2) nasz stosunek, zgodnie z w/w wzorami wyglądałby następująco:

Natomiast przy założeniu, że koło zębate (1) jest elementem napędzającym listwę zębatą (2) zależność ta przedstawia się, jak pokazano poniżej:

Wzór na przełożenie przekładni listwowej, gdy listwa jest elementem napędzającym
Zerowe przełożenie lub nieskończone przełożenie? Jak to możliwe 😯. Wszystko to spowodowane jest faktem, że przekształcamy ruch obrotowy na ruch liniowy, dlatego też w przekładniach zębatych listwowych częściej oblicza się prędkość liniową listwy.
Prędkość liniowa listwy zębatej
Prędkość liniowa listwy zębatej jest to prędkość wysuwania lub wsuwania się listwy, która zależy od koła napędzającego listwę zębatą. Aby ją obliczyć należy porównywać prędkość kątową koła zębatego do prędkości liniowej listwy. Sytuacja ta prezentuje się następująco:

Upraszczając przekładnie do modelu toczącego się koła po powierzchni prostokąta można łatwo zauważyć, że w punkcie styku prędkość liniowa pochodzącą od koła będącego w ruchu kątowym i prędkość liniowa listwy zębatej jest praktycznie taka sama (pomijając straty mocy podczas zazębiania się). Wówczas możemy skorzystać z zależności:

przy czym:
v2 – prędkość liniowa listwy zębatej
ω1 – prędkość kątowa koła zębatego
r1 – promień koła zębatego
Dzięki temu znając prędkość kątową i geometrię koła zębatego możemy łatwo przeliczyć prędkość liniową listwy.
Przekładnie mechaniczne zębate planetarne (obiegowe)
Przekładnie zębate planetarne to moim zdaniem bardzo fascynujące, niebanalne przekładnie o dosłownie hipnotyzującej pracy. Konstrukcja takiej przekładni jest następująca:


Jak widać, przekładnia obiegowa jest znacznie bardziej skomplikowana od w/w. Składa się ona z koła centralnego o uzębieniu wewnętrznym (1) oraz koła centralnego o uzębieniu zewnętrznym (2). Obydwa te koła są współosiowe, co znaczy, że osie ich obrotów się pokrywają. Pozostałe koła (3) to satelity, których przeważnie jest więcej niż dwa i są one ze sobą połączone elementem zwanym jarzmem.
Przekładnia taka może pracować na kilka sposobów w zależności od tego, która z części jest nieruchoma: jarzmo, czy któreś z kół centralnych. Przeanalizujemy zatem kilka możliwości i zobaczymy, jak możemy określić przełożenie takiego mechanizmu:
Przekładnia obiegowa z nieruchomym jarzmem
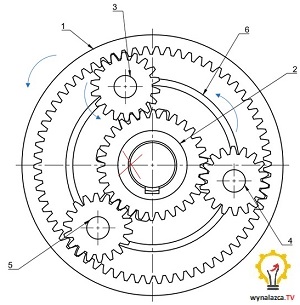
Pierwszy omawiany przypadek będzie dotyczył jarzma, które jest nieruchome. Wówczas ruch obrotowy centralnego koła o uzębieniu zewnętrznym jest przekazywany na koło centralne o uzębieniu wewnętrznym za pośrednictwem ruchu obrotowego satelit, które mogą się tylko obracać wokół własnych osi. Przedstawię to na rysunku:

przy czym:
1 – koło centralne o uzębieniu wewnętrznym
2 – koło centralne o uzębieniu zewnętrznym
3, 4, 5 – satelity
6 – jarzmo
Unieruchomione jarzmo symbolizuje czerwony znak ‘X’. Wówczas przełożenie przekładni obiegowej prezentuje się następująco:
przy czym:
i – przełożenie przekładni obiegowej
z1 – ilość zębów na kole centralnym o uzębieniu wewnętrznym
z2- ilość zębów na kole centralnym o uzębieniu zewnętrznym
Przekładnia obiegowa z nieruchomym kołem centralnym o uzębieniu zewnętrznym
Druga z opcji to sytuacja, w której koło centralne o uzębieniu zewnętrznym (2) jest nieruchome, a ruch obrotowy jest przekazywany z koła centralnego o uzębieniu wewnętrznym (1) na jarzmo, za pomocą satelit (3), które w tym przypadku obracają się wokół własnej osi i osi centralnej.
Przełożenie w tym przypadku określić można bazując na metodzie „myślowego unieruchomienia jarzma”. Wówczas przełożenie takiej przekładni obiegowej przedstawia się następująco:
przy czym:
i – przełożenie przekładni obiegowej
z1 – ilość zębów na kole centralnym o uzębieniu wewnętrznym
z2 – ilość zębów na nieruchomym kole centralnym o uzębieniu zewnętrznym
Przekładnia obiegowa z nieruchomym kołem centralnym o uzębieniu wewnętrznym
Ostatnią z opcji to sytuacja, w której unieruchomione jest koło centralne o uzębieniu wewnętrznym (2), a ruch obrotowy jest przekazywany z koła centralnego 2 na jarzmo, wykorzystując przy tym koła satelitarne.

Przełożenie określamy na podobnej zasadzie i jest ono równe:

przy czym:
i – przełożenie przekładni obiegowej
z1 – ilość zębów na nieruchomym kole centralnym o uzębieniu wewnętrznym
z2- ilość zębów na kole centralnym o uzębieniu zewnętrznym
Dodam, że przekładnie obiegowe często znajdują zastosowanie w przypadkach, gdy chcemy umieścić mechanizm przekazywania ruchu w korpusach i w celu redukcji wymiarów, uzębienie wewnętrzne jest wykonywane bezpośrednio na ścianach obudowy.

Przekładnie mechaniczne śrubowe – obliczenie przełożenia i zasada działania
Przekładnie śrubowe podobnie, jak przekładnie zębate listwowe również zamieniają ruch obrotowy na ruch liniowy, przy czym do tego celu wykorzystuje się inną geometrię (śruby). Ich schemat działania wygląda następująco:


Przekładnia jest wyposażona w śrubę napędową, której ruch obrotowy powoduje przesuw liniowy nakrętki wzdłuż osi obrotu śruby. Mechanizm ten jest często wykorzystywany np. w podnośnikach samochodowych, czy maszynach CNC lub drukarkach 3d (zobacz: wykonywanie prototypów na drukarkach 3d w naszej prototypowni 3d ).
Przełożenie przekładni śrubowej
Przełożenie przekładni śrubowej określa się w nietypowy sposób, ponieważ wykorzystuje się w tym celu prostą zależność pomiędzy prędkością kątową śruby, a prędkością liniową nakrętki:

przy czym:
vn- prędkość liniowa nakrętki
ωśr – prędkość kątowa śruby
s – skok gwintu
Przełożenie dodatnie, a przełożenie ujemne
Muszę jeszcze wspomnieć o bardzo ważnej właściwości przełożenia tj. jego znaku (dodatniego lub ujemnego), szczególnie w przekładniach zębatych. W tego rodzaju mechanizmach mamy bowiem do czynienia z przełożeniem ujemnym lub z przełożeniem dodatnim.
W przypadku zazębienia się dwóch zewnętrznych części kół zębatych, wchodzących w skład przekładni zębatej (zazębienie zewnętrzne) przełożenie jest ujemne (zmienia się kierunek prędkości jednego koła względem drugiego): i < 0
W przypadku zazębienia się zewnętrznej części jednego koła z wewnętrzną częścią drugiego koła, wchodzących w skład przekładni zębatej (zazębienie wewnętrzne) przełożenie jest dodanie (nie zmienia się kierunek prędkości jednego koła względem drugiego): i > 0
Podsumowanie – Rodzaje przekładni. Obliczenia przełożenia przekładni
Mam nadzieję, że dowiedziałeś się jakie w mechanice wyróżniamy podstawowe rodzaje przekładni i jak obliczać przełożenia przekładni. Oczywiście trzeba powiedzieć, że przekładni jest o wiele więcej niż te pokazane w tym artykule. Te bardziej skompilowane często bazują na połączeniu kilku podstawowych. Temat przekładni jest obszerny, a sposób ich działania jest widowiskowy i bardzo pomocny w projektowaniu maszyn, co sprawia, że warto znać ich podstawy.
Jeśli sam chcesz skonstruować jakąś maszynę to nie wahaj się tylko napisz do nas, a zespół naszych inżynierów chętnie Ci pomoże SZYBKI KONTAKT
Redagował, współautor: mgr inż. Dawid Pjanka “Vinci”

Naszym celem jest ułatwienie procesu komercjalizacji innowacyjnych rozwiązań, dlatego oferujemy kompleksowe wsparcie, w tym konsultacje, badania patentowe, tworzenie prototypów oraz pomoc w ochronie wzorów przemysłowych i patentów.
Dzielimy się wiedzą poprzez wykłady, prelekcje, ebooki, kursy online i treści w social media. W przystępny sposób edukujemy o ochronie własności intelektualnej i pokazujemy, jak skutecznie realizować innowacyjne projekty. Wynalazca TV to miejsce, gdzie innowacja spotyka się z wiedzą i wsparciem na każdym kroku.
- Poradnik dla wynalazców: Jak sprawdzić swój pomysł na produkt – analiza prawna - 8 października 2024
- Jak sprawdzić swój pomysł na produkt? – analiza finansowa – Poradnik dla wynalazców - 10 września 2024
- Nowe procesory w 2023 roku – czym zaskoczy nas AMD i Intel? - 19 marca 2023
[1] „Mały Poradnik Mechanika tom II, praca zbiorowa”, WNT, Warszawa, 1994
[2] „Theory of Machines and Mechanisms” J. J. Uicker; G. R. Pennock; J. E. Shigley New York: Oxford University Press, 2003
[3] https://www.transmissionrepaircostguide.com/types-of-transmissions/
[4] „Podstawy konstrukcji maszyn połączenia i przekładnie zębate” Iwaszko Jerzy, 2012
[5] „Kinematics and Dynamics of Planar Machinery”, Prentice Hall, 1979505 B1