Co to jest haptyka, analiza techniczna opatentowanych robotów haptycznych
W tym artykule opowiem Ci nieco o dość ciekawej ‘branży’ w robotyce, a mianowicie haptyce… ‘Branży’ z którą pewnie coraz częściej będziesz spotykał się w swoim zawodowym i prywatnym życiu… Urządzeń haptycznych będziesz używał do wszelkiego rodzaju kontrolerów, a szczególnie tych, które korzystają z technologii VR (wirtualna rzeczywistość)… Oprócz tego zobaczysz, jak w praktyce wygląda przegląd i analiza techniczna patentów, którą wykonujemy, gdy projektujemy dla klientów wynalazki (tworzenie wynalazków).
Co to jest haptyka? Do czego wykorzystuje się roboty haptyczne? Jakie są znane rozwiązania robotów haptycznych? Jakie są patenty na roboty haptyczne? Jak działają urządzenia haptyczne?
Co to jest haptyka? Czym są roboty haptyczne?

Haptyka lub technologia haptyczna to nietypowa technika komunikacji danego urządzenia haptyczneo z jego operatorem. Unikalność tej technologii polega na tym, że różnorodne urządzenia haptyczne komunikujące się z użytkownikiem (człowiekiem) oddziałują na jego zmysł dotyku 😮. Oznacza to, że urządzenia haptyczne bezpośrednio działają na ludzi pewnymi stałymi, zmiennymi lub okresowymi (wibracyjnymi) siłami. Urządzenia wykorzystujące tą technikę nazywamy z angielskiego Haptic Devices.
Zastosowanie robotów haptycznych i zastosowanie haptyki
Urządzenia haptyczne zwiększają ludzką percepcję na odczuwanie wirtualnego świata 3d, co jest coraz częściej wykorzystywane w technologii wirtualnej rzeczywistości (Virtual Reality – VR). Bardziej zaawansowane i odpowiedzialne manipulatory haptyczne są wykorzystywane w takich dziedzinach, jak projektowanie 3d i modelowanie 3d, nanotechnologia, medycyna, edukacja za pomocą symulatorów itp. Wszystko to powoduje, że coraz częściej spotykamy i będziemy spotykać takie urządzenia.

Bardzo ciekawym i powiedziałbym innowacyjnym zastosowaniem urządzeń haptycznych jest możliwość sterowania nimi innymi urządzeniami i 'odczuwanie’ tego co element wykonawczy danej maszyny.
Istota sterowania robotem haptycznym
Istota sterowania robotem haptycznym w teorii wydaje się być w miarę prosta. Polega to na tym, że gdy użyjemy tzw. efektora (czyli części, którą się steruje robotem haptycznym – w komputerze moglibyśmy powiedzieć, że efektorem jest myszka komputerowa) i operując nim w tzw. przestrzeni roboczej efektora robota haptycznego (dla myszki komputerowej przestrzenią roboczą może być np. podkładka pod myszkę) to wówczas generujemy odpowiedni ruch, odpowiedniej części urządzenia, którym sterujemy (w komputerze może być to kursor na ekranie) lub modelem 3d w symulacji komputerowej.
Pomimo stosunkowo prostej koncepcji i ‘idei działania’ robotów haptycznych warto zwrócić uwagę, na to, że urządzenia haptyczne są tak naprawdę bardzo skomplikowanymi maszynami…
Generowanie sił w robotach haptycznych

Generowanie sił w robocie haptycznym jest możliwe dzięki silnikom, które znajdują się wewnątrz obudowy robota. Napędy te potrafią wygenerować odpowiednie siły stałe, zmienne, bądź okresowe (wibracje). Wszystko oczywiście zależy od tego, jak jest zaprogramowany robot haptyczny. Najbardziej istotne jest to, żeby pobudzić w odpowiedni sposób zmysł dotyku i wywoływać odpowiednie reakcje na generowane bodźce fizyczne osoby operującej danego robota.

Zasada działania robota haptycznego
Myślę, że zasadę działania robota haptycznego najlepiej będzie przedstawić na ilustracjach. Poniżej możesz zapoznać się z kilkoma zdjęciami, które przygotowałem specjalnie dla tego artykułu 💪


Na figurze A1 widzisz dłoń operatora, który trzyma w niej efektor robota haptycznego. Robot taki może być podłączony do komputera i sterować np. ruchem danego modelu 3d w zainstalowanym na nim oprogramowaniu (figura B1) lub może być podłączony bezpośrednio z maszyną, której wówczas steruje jej elementem wykonawczym (figura C1).
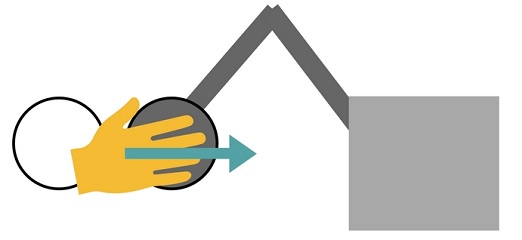

Widać, że gdy operator robota haptycznego zaczyna ruch (rysunek A2) to zarówno w programie, jak i w sterowanej maszynie dochodzi do odpowiedniego ruchu kursora (rysunek B2) lub elementu wykonawczego w sterowanej maszynie (rysunek C2).


Zauważ jednak, że gdy nasz operator natrafi w programie kursorem na przeszkodę tj. zaprogramowany model 3d (rysunek B3) trafi na inny, sztywy model 3d (fioletowa bryła na rysunku) lub gdy natrafi w sterowanym robotem haptycznym elementem wykonawczym maszyny na przeszkodę tj. ścianę (rysunek C3) to wówczas nie może on wykonać już żadnego ruchu w tym samym kierunku, bowiem zaczynają działać silniki robota haptycznego i powodują znaczny opór (rysunek A3).
Taka jest właśnie zasada działania robotów haptycznych. Oczywiście nasze 'czucie’ oporu oraz nasza precyzja (przełożenie przemieszenia sterowanego elementu) są uzależnione od tego, jak jest zaprogramowany program sterujący.
Możliwości robotów haptycznych
Teraz, gdy już znasz zasadę działania urządzeń haptycznych możesz się zastanowić nad możliwościami jakie daje haptyka…
- Dla inżyniera konstruktora – bardzo ciekawym rozwiązaniem jest projektowanie 3d za pomocą urządzenia haptycznego. Projektanci 3d, a szczególnie designerzy 3d, mogą poczuć się jak rzeźbiarze. Będą czuli co tworzą z bryły 3d.
- Dla lekarzy chirurgów – urządzenia haptyczne są niezastąpione przy skomplikowanych operacjach, gdzie ‘czują przez maszynę’ ciało pacjenta, a przełożenie wykonywanych przez nich ruchów jest płynne i pozbawione drgań ręki (kompensacja drgań).
- Dla maniaków rozrywki – kontrolery haptyczne dostarczą, im niepowtarzalnych wrażeń. Nosząc np. kamizelki haptyczne mogą poczuć w odpowiednim miejscu obrażenia, które zadał im przeciwnik.
I wiele więcej… te które wymieniłem tutaj to tylko klika przykładowych zastosowań haptyki. A ty masz jakiś ciekawy pomysł? Napisz w komentarzu pod postem 😉
Elektronika w urządzeniach haptycznych
Urządzenia haptyczne bardzo często posiadają specjalne czujniki i mierzą takie parametry, jak położenie efektora, czy przyłożoną do niego siłę przez operatora. Dzięki odpowiedniemu oprogramowaniu dane te są przetwarzane i za pomocą specjalnych algorytmów sterujących zadawane są sygnały sterujące na układ wykonawczy robota haptycznego (czyli jego silniki). Operator właśnie wtedy jest w stanie wyczuć kształt, obrys, a nawet strukturę modelu 3d (sterowanie środowiskiem wirtualnym) lub prawdziwego przedmiotu (sterowanie środowiskiem rzeczywiste).
 Problemy haptyki – elektronika i konstrukcja
Problemy haptyki – elektronika i konstrukcja
W haptyce możemy wyróżnić kilka problemów technicznych związanych zarówno z elektroniką, sterowaniem, jak i mechaniką. Niektóre z nich zostały już rozwiązane.
Dla elektroników i programistów robotów haptycznych uciążliwe było dobranie odpowiedniej częstotliwości próbkowania informacji pobieranych z urządzenia (np. położenie efektora lub przyłożone siły przez operatora na efektor). Wiązało się to również z zadawaniem odpowiednich sygnałów na elementy wykonawcze (silniki) robotów haptycznych, oddziałujących na operatora.
Cały kłopot wynikał z czasu przesyłu informacji pochodzących z nerwów człowieka do mózgu. Po wielu badaniach oszacowano, że aby robot haptyczny naturalnie oddziaływał na nasz zmysł dotyku to cykl pobierania i przesyłu informacji (tzw. haptic loop) powinien być przeprowadzany z częstotliwością ok. 1kHz 🤪
Oprócz tego manipulatory i kontrolery haptyczne – szczególnie te o bardziej odpowiedzialnym przeznaczeniu – z punktu widzenia mechaniki powinny być skonstruowane w taki sposób, aby zapewnić odpowiednią sztywność, przy jak najmniejszej masie oraz wykazywać jak najmniejsze luzy. Dzięki temu roboty haptyczne mają znacznie lepszą dokładność.

Analiza techniczna OPATENTOWANYCH konstrukcji urządzeń haptycznych
Wiesz już mniej więcej na czym polega istota działania urządzeń haptycznych. Poniżej zaprezentuje Ci na przykładzie robotów haptycznych, jak wygląda przykładowa analiza techniczna opatentowanych rozwiązań tego typu. Po co to?
Analizy takie wykonujemy dla naszych klientów, gdy opracowujemy dla nich nowe rozwiązania, po tym, jak wykonają sobie w naszym biurze patentowym badania stanu techniki lub zdolności patentowej.
Wiemy wtedy, które rozwiązania techniczne są chronione prawnie i zastanawiamy się co zrobić, żeby wynalazek naszego uzyskał patent. Innymi słowy zastanawiamy się nad tym, jak obejść patent konkurencji, przy jednoczesnej maksymalizacji zakresu ochrony.
Wróćmy jednak do naszych dywagacji…
Analiza patentu manipulatora haptycznego firmy Novint
Firma Novint posiada jeden manipulator typu Haptic Device posiadający 3 stopnie swobody. Komercyjna nazwa ich urządzenia to Novint Falcon.

Poniższa analiza konstrukcyjno-techniczna manipulatora haptycznego Novint Falcon została przeprowadzona na podstawie publikowanych materiałów na stronie producenta oraz patentu firmy Force Novint nr: US 8806974, który odnaleźliśmy w bazach patentowych, który odnaleźliśmy w specjalistycznych bazach patentowych (jeśli też szukasz czyjegoś patentu zapytaj tutaj: kontakt).


Figura 1 i figura 2 przedstawiają widok robota haptycznego w perspektywie, na którym wyróżnić można cztery zasadnicze elementy tj.: bazę talerzową (2), obudowę (35), zespół ramion (8 i 10) tworzące łańcuch kinematyczny (6) oraz ruchomy efektor (4). Ponadto istotnymi cechami konstrukcyjnymi danego rozwiązania jest to, że:
- baza talerzowa (2) połączona jest na sztywno lub śrubami z podstawą służącą do usytuowania całego manipulatora haptycznego na płaskiej powierzchni, w taki sposób, że baza (2) jest pionowo zorientowana,
- w obudowie (35) wykonano specjalnie ukształtowane otwory (36) wraz z uszczelnieniami, dzięki którym możliwy jest wsuw i wysuw pierwszych ramion (8) i które zapewniają odporność na wszelkiego typu zabrudzenia mogące dostać się do wnętrza urządzenia powodując jego uszkodzenie,
- baza talerzowa (2) posiada trzy specjalne, kinematyczne łańcuchy (6), zapewniające połączenie tej bazy (2) z efektorem (4), z których każdy zawiera dwa ramiona – pierwsze (8) i drugie (10), przy czym:
- pierwsze ramiona (8) o zakrzywionym profilu (56, 52, 62) połączone są wałem (28) z elementem montażowym (26), który jest przykręcony do bazy talerzowej (2) lub stanowi z nią jednolitą bryłę, w taki sposób, że ramiona te (8) mogą obracać się względem tego elementu (26), a jednocześnie obroty (lub hamowanie) tych ramion (8) zapewnia silnik (np. elektryczny) (32) z czujnikiem kątowym mierzącym obroty (pozycję) wału (34) tego silnika (32), a sprzężenie ramion (8) z silnikiem (32) realizowane jest poprzez specjalny mechanizm przedstawiony na fig. 3 i fig. 4, znamienny tym, że obroty wału (34) przekazywane są z silnika (32) na zakrzywione ramiona (8) o powierzchni odpowiednio dostosowanej do użytej przekładni, a mianowicie przekładni ciernej, zębatej lub pasowej (kablowej), przy czym pasy (kable) (64) w najbardziej zaawansowanej konstrukcji (tzn. zwiększającej sprawność, sztywność i napięcie przekładni) zamocowane są w dwóch miejscach na ramionach (8) oraz na wale (34), w taki sposób, że końcówka (68a) pasa (kabla) (64b) przymocowana jest na sztywno do ramienia (8) (72) i wału (34) (80), a drugi pas (kabel) (64a) zamocowany jest na sztywno do wału (34) (78), nawinięty na inny wał (77) i jego końcówka (66a) zamocowana jest do sprężyny (74), której drugi koniec umieszczono na podporze (76), przy czym inne – zmniejszające napięcie i sztywność pasa (kabla) (64) konstrukcje przewidują zastosowanie jednego pasa (kabla) (64) i/lub brak wału (77) i/lub brak sprężyny i/lub brak zamocowania pasa (kabla) na wale (34) silnika (32) na sztywno,
- drugie ramiona (10) stanowiące dwa pręty (12) połączono na jednym końcu (14) ze sobą z efektorem (4) poprzez pary kinematyczne (16), równocześnie stosując takie samo rozwiązanie na drugim końcu (18) łącząc drugie ramiona (10) z pierwszymi (8) poprzez pary kinematyczne (22), stosując takie pary kinematyczne (22), by każda zapewniała tym ramionom (10) posiadanie dwóch stopni swobody na obu końcach lub dwa stopnie swobody na jednym końcu i trzy na drugim,
- ramiona (8 i 10) usytuowane są względem bazy talerzowej (4) co 120°, przy czym górne ramie jest zorientowane pionowo względem doczepianej podstawy
- efektor (6) posiada trójkątny kształt, do którego możliwe jest przymocowanie końcówki (np. sferycznej) poprzez specjalny moduł (82) dodający jeden lub więcej kątowych stopni swobody, przy czym efektor taki może być wyposażony dodatkowo w jeden lub więcej programowalnych przycisków
Analiza patentu manipulatora haptycznego firmy Force Dimension
Firma Force Dimension posiada sześć manipulatorów haptycznych, przy czym różnice tych modeli uwarunkowane są ilością stopni swobody i zastosowaną konstrukcją, przede wszystkim części chwytowej. W tym przypadku dokonano analizy technicznej dla modelu Omega 3.

Analiza konstrukcyjno-technologiczna manipulatora haptycznego Omega 3 została przeprowadzona na podstawie publikowanych materiałów na stronie producenta oraz patentu firmy Force Dimension nr EP 1876505 B1, który odnaleźliśmy w specjalistycznych bazach patentowych (jeśli też szukasz czyjegoś patentu zapytaj tutaj: kontakt).
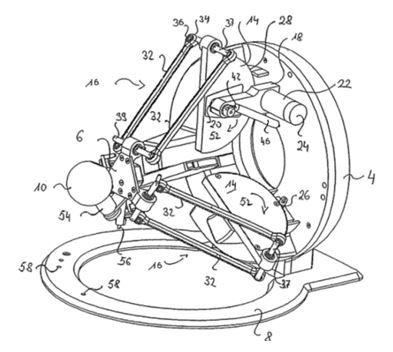
Figura 1 przedstawia widok manipulatora haptycznego Omega 3 w perspektywie, na którym wyróżnić można cztery zasadnicze elementy tj.: podstawę robota haptycznego (8), bazę talerzową (4) pionowo zorientowaną, zespół ramion (14 i 16) tworzące łańcuch kinematyczny oraz ruchomy efektor (6). Ponadto istotnymi cechami konstrukcyjnymi odróżniającymi model firmy Force Dimension od manipulatora haptycznego firmy Novint jest to, że:
- podstawa (8) posiada otwory montażowe (58) pozwalające przymocować na sztywno urządzenie do podłoża
- pierwsze ramię (14) u góry posiada tzw. system biernej kompensacji grawitacji, stanowiący zespół (46) przymocowany do bazy (4) i koła pasowego (42), który składa się najczęściej ze sprężystego elementu, kabla lub przewodu i kabla nawiniętego na koło pasowe
- efektor (6) posiada trójkątny kształt, do którego możliwe jest przymocowanie końcówki (np. sferycznej) (10) na sztywno lub opcjonalnie poprzez specjalny moduł (54) dodający jeden lub więcej kątowych stopni swobody, przy czym efektor taki może być wyposażony dodatkowo w jeden programowalny przycisk.

Analiza patentu manipulatora haptycznego firmy Force Dimension
Innym ciekawym, natomiast nieprodukowanym już manipulatorem haptycznym o 3 stopniach swobody jest manipulator haptyczny wspomnianej Firmy Force Dimension. Przedstawia go ich patent o numerze EP 1498797A1, który odnaleźliśmy w specjalistycznych bazach patentowych (jeśli też szukasz czyjegoś patentu zapytaj tutaj: kontakt).



Figura 1 przedstawia widok robota haptycznego w perspektywie, na którym wyróżnić można cztery zasadnicze elementy tj.: nieruchomą podstawę (1), zespół ramion (10 i 20) tworzące łańcuch kinematyczny oraz ruchomy efektor (2). Ponadto istotnymi cechami konstrukcyjnymi tego manipulatora haptycznego jest to, że:
- do nieruchomej podstawy (1) zamocowane zostały trzy silniki obrotowe (30) wraz z czujnikiem kątowym (40), których osie obrotu (31) są do siebie równoległe i prostopadłe do podstawy (1), a obroty generowane przez te silniki (30) są przekazywane na pierwsze ramiona (10) obracające się wzdłuż osi (11) za pomocą przekładni pasowej (kablowej) (50), szczegółowo uwidocznionej na fig. 2, której jeden z końców nawinięty jest na bęben (52), a drugi z końców tej przekładni (50) doczepiony został w specjalnym miejscu (60) na ramieniu (10) śrubą (61), przy czym w celu odpowiedniej orientacji pasa (kabla) do podstawy (1) dołączono na wsporniku (70) obracający się walec (koło pasowe) (72)
- drugie ramiona (20) stanowiące dwa pręty, połączone są z pierwszymi (10) i z ruchomym efektorem (2) tak, że posiadają dwa obrotowe DOF, na każdym z końców po jednym
- ramiona (10 i 20) usytuowane są względem podstawy (1) co 120°, co zostało uwidocznione na fig. 3
- do efektora (2) możliwe jest przymocowanie końcówki (np. sferycznej) lub chwytaka, poprzez specjalny moduł (95) dodający jeden lub więcej kątowych stopni swobody, przy czym efektor taki może być wyposażony dodatkowo w jeden lub więcej programowalnych przycisków.
Porównanie wybranych opatentowanych konstrukcji robotów haptycznych
W poniższej tabeli dokonano porównania trzech wyżej analizowanych konstrukcji. Niestety ze względu na to, że konstrukcja z patentu robota haptycznego nr EP1498797A1 (pkt. 1.3.3.) nie jest już produkowana nie udało się uzyskać szczegółowych danych i parametrów na jej temat.
| KRYTERIUM | PATENT NOVINT US 8806974 | PATENT FORCE DIMENSION EP 1876505B1 |
PATENT FORCE DIMENSION |
| Przestrzeń robocza | 100x100x100 | Ø160×110 | – |
| Możliwe generowane siły | Do 9N | Do 12N | – |
| Materiał | Głównie tworzywa sztuczne | Głównie aluminium | – |
| Możliwość używania przez osoby prawo i leworęczne | Tak | Tak | Tak |
| Konstrukcja | Skomplikowana | Skomplikowana | Mniej skomplikowana |
| Rodzaj komunikacji | USB 2.0 | USB 2.0 | – |
| Rodzaj zasilania | Uniwersalne 100-240V, 50-60 Hz | Uniwersalne 100-240V, 50-60 Hz | – |
| Ilość programowalnych przycisków | Jeden lub z dodatkowym wyposażeniem więcej | Jeden | Jeden lub z dodatkowym wyposażeniem więcej |
| Kompensacja grawitacji | Aktywna | Bierna | Aktywna |
| Szybkość odświeżania danych | – | Do 4kHz | – |
Z tabeli wynika, że komercyjnie sprzedawane urządzenia haptyczne charakteryzuje przestrzeń robocza wynosząca około 110 cm3, przy maksymalnych generowanych siłach do 12N. Firma Novint stosuje do budowy głównie tworzywa sztuczne, a Force Dimension aluminium, dzięki czemu zwiększono sztywność.
Warto również wspomnieć, że rozwiązania te zapewniają możliwość użytkowania urządzenia przez osoby lewo i praworęczne oraz w niektórych przypadkach przewidziano możliwość dodatkowego doposażenia końcówki efektora w specjalne moduły np. w postaci kilku programowalnych przycisków.
Sterowanie i wspomaganie siłowe w urządzeniach haptycznych
Cała idea sterowania robotami haptycznymi została przedstawiona na powyższym rysunku. Jak widać w celu prawidłowego sterowania urządzeniami haptycznymi należy nieustanie dokonywać pomiarów niektórych parametrów robota i układu, którym się struje. Następnie, w zależności od tych parametrów zadaje się odpowiedni, skompensowany sygnał w celu wygenerowania odpowiedniej siły przez układ wykonawczy robota haptycznego (silniki). Sterowanie urządzeń haptycznych najczęściej realizowane jest w otwartym układzie sterowania ze sprzężeniem zwrotnym.
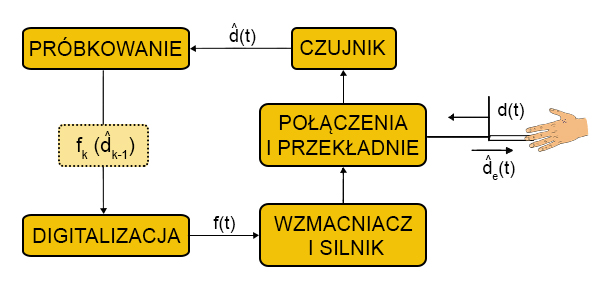
Sygnał wejściowy (np. pozycja efektora) przekazywany jest do jednostki sterującej, która za pomocą odpowiednich algorytmów przetwarza te sygnały, a następnie na ich podstawie generuje sygnały wyjściowe. Sygnały wyjściowe (sterowanie wybranymi silnikami w robocie haptycznym) są odpowiednio wzmocnione 💪, a następnie trafiają do układu wykonawczego, czyli do silników. Napędy urządzeń haptycznych generują wtedy odpowiedni moment i w efekcie oddziałują na operatora odpowiednią siłą utrudniając jego dalsze sterowanie efektorem robota haptycznego.
Sensory w urządzeniach haptycznych – sensoryka 🧐
W celu określenia pozycji i prędkości elementu wykonawczego najczęściej, jako czujniki położenia i prędkości, stosuje się enkodery optyczne. Czujniki te dzielą się na inkrementalne oraz absolutne.

Tak na szybko… różnica ich działania polega na tym, że enkodery inkrementalne umożliwiają pomiar kątów na zasadzie zliczania impulsów, a to oznacza, że enkodery te umożliwiają pomiar pozycji względnej i po wyłączeniu zasilania pozycja nie może być zapamiętana (robot po wyłączeniu i włączeniu nie wie, gdzie znajduje się jego enkoder – nie ‘widzi jego pozycji’)
W przypadku enkoderów absolutnych tarcza i elektronika enkodera jest zaprojektowana w taki sposób, że każda jego pozycja posiada określoną cyfrowo zakodowaną wartość. Dzięki takiemu rozwiązaniu możliwe jest zapamiętanie pozycji nawet po odłączeniu zasilania.
Zasadniczą zaletą zastosowania enkoderów inkrementalnych jest ich znacznie mniejsza cena w porównaniu z enkoderami absolutnymi. Warto dodać, że w wyniku operacji matematycznych (różniczkowania) zmian położenia możliwe jest określanie prędkości poszczególnych członów i dlatego enkodery mogą pełnić jednocześnie rolę czujników prędkości.
Układ wykonawczy urządzeń haptycznych
Układ wykonawczy urządzeń haptycznych stanowią te elementy, które potrafią wygenerować moment lub siłę. Na początku warto zdefiniować, z jakiego rodzaju napędów tj. czy z pneumatycznego, hydraulicznego lub elektrycznego najlepiej jest skorzystać.
Ze względu na znane powszechnie zalety i wady każdych z w/w sposobów najlepszym wyborem jest układ składający się z silników elektrycznych. Wybór ten wynika z łatwości i dokładności ich sterowania oraz wielkości wymaganych momentów oddziałujących na człowieka (operatora robota haptycznego).
Rynek oferuje ogromną ilość rodzajów silników elektrycznych prądu stałego DC i zmiennego AC. Wybór silników elektrycznych jest ogromny, jednakże najczęściej w urządzeniach haptycznych spotyka się silniki prądu stałego DC, a konkretnej BLDC – bezszczotkowe silniki prądu stałego. Ich kompaktowa budowa i zasada działania, powodują, że posiadają stosunkową małą masę w stosunku do generowanego momentu oraz zajmują mało miejsca.
Podsumowanie – co to jest haptyka, analiza techniczna opatentowanych robotów haptycznych
W artykule tym mogłeś dowiedzieć się co to jest haptyka, czym są roboty haptyczne oraz poznać zastosowanie robotów haptycznych. Zobaczyłeś też, jak w praktyce wygląda analiza techniczna gotowych rozwiązań, co jest szczególnie istotne w trakcie opracowywania wynalazku dla klientów, czym się na co dzień zajmujemy (zobacz tworzenie wynalazków).
Roboty haptyczne to przyszłość… Wierzę, że już niedługo będziemy używać gadżetów haptycznych, szczególnie w postaci kontrolerów do gier komputerowych, również tych stworzonych w technologiach wirtualnej rzeczywistości.
Jeśli potrzebujesz POMOCY w analizie technicznej swoich wynalazków, czy prostszych mechanizmów odezwij się do nas, a na pewno razem jakoś podziałamy! > SZYBKI KONTAKT


- Rzecznik patentowy – Kim jest i w czym może pomóc? - 7 listopada 2024
- Dotacja 2024: znaki towarowe, patenty, wzory przemysłowe – dofinansowanie SME - 11 lutego 2024
- 2 Strategie projektowania pomysłów, wynalazków i produktów - 29 czerwca 2021
[1] http://www.robotyka.com/teoria_spis.php
[2] W. Królikowski, W. Rubinowicz: „Mechanika teoretyczna”. Warszawa: PWN, 2012.
[3] http://www.mecademic.com/What-is-a-parallel-robot.html
[4] „The HapticMaster, a new high-performance haptic interface” – Van der Linde R.Q., Lammertse P., Frederiksen E., Ruiter B. FCS Control Systems, The Netherlands
[5] „Haptics” – Blake Hannaford, Allison M. Okamura
[6] http://techcrunch.com/2015/06/11/oculus-touch/
[7] http://www.novint.com/
[8] Patent firmy Novint: US 8806974
[9] http://www.forcedimension.com/
[10] Patenty firmy Force Dimension: EP 1498797 A1, EP 1876505 B1