Jak projektować podnośniki śrubowe?
Jak projektować podnośniki śrubowe?
Zastanawiasz się jak projektować podnośniki śrubowe? Masz problem z obliczeniami wytrzymałościowymi? Nie wiesz jakie wzory stosuje się do zaprojektowania podnośnika?
Zapraszam Cię więc do tego poradnika, w którym przedstawię Ci przykładowy projekt podnośnika. Jestem przekonany, że artykuł ten odpowie na wszystkie Twoje pytania związane z projektowaniem podnośników, których sercem jest mechanizm śrubowy.
Pamiętaj, że jeśli uznasz, że potrzebujesz pomocy zaprojektowania podnośnika (nie ważne, czy jesteś studentem, wynalazcą lub przedsiębiorcą) – chętnie Ci pomożemy! Podaj założenia projektowe wysyłając maila na: kontakt@wynalazca.tv
Kilka słów o podnośnikach śrubowych
Jak już wspomniałem, podnośniki śrubowe są to urządzenia, w których głównym elementem jest mechanizm śrubowy. To właśnie dzięki niemu uzyskujemy dużą siłę podnoszenia, która w połączeniu z pomysłową konstrukcją ramion podnośnika pozwala na dźwiganie nawet takich obiektów jak pojazdy samochodowe.
Projektowanie podnośników śrubowych – krok po kroku
Proces projektowania podnośników śrubowych jest praktycznie nie zmienny i dzieli się na sześć głównych etapów:
Projektowanie podnośników śrubowych – analiza wstępna
Analiza geometryczna – jest to etap początkowy. Tworzymy w nim główne założenia na temat projektowanego urządzenia.
Jego celem jest wyznaczenie głównie rozstawu śruby, poznanie kątów towarzyszących podczas pracy projektowanego podnośnika oraz długości ramion, jeśli jeszcze nie są znane.
W skrócie dowiadujemy się wszystkiego o gabarytach przyszłego urządzenia.

Analiza rozkładu sił – w drugim etapie należy dokładnie przeanalizować, jak rozkładają się siły przy dobranej konstrukcji podnośnika.
Proces ten prowadzi do wyznaczenia maksymalnej siły, która będzie działać osiowo na śrubę oraz sił reakcji działających na poszczególne ramiona.
Obliczenia wytrzymałościowe – w tym miejscu przeprowadza się obliczenia wytrzymałościowe.
Prowadzą one głównie do określenia optymalnej średnicy śruby gwintu, jaki na niej należy wykonać oraz gabarytów ramion.
Wyniki te muszą być takie, aby mieć pewność, że podnośnik będzie spełniał założenia i udźwignie ciężar, jaki ma podnosić.
Podnośniki śrubowe – projekt CAD i symulacja
Projektowanie techniczne 3d – etap, w którym wszystkie wyniki obliczeń „transportujemy” do wirtualnej przestrzeni 3d tzn. wykonujemy projekt 3d naszego podnośnika. Tutaj wstępnie lub na gotowo dobiera się też części katalogowe np. łożyska (kliknij, aby dowiedzieć się więcej o łożyskach).
Jeśli później (tj. na etapie komercjalizacji) planujesz wykonać animację 3d działania podnośnika, wygodnie jest od razu rozważyć pracę w programie CAD w module przeznaczonym do tworzenia złożeń i tam narzucić odpowiednie wiązania bądź połączenia, które w przyszłości posłużą do animacji.
Analiza MES i symulacje kinematyczno-dynamiczne – W piątym etapie, możemy sprawdzić nasze obliczenia wykonanie w sposób analityczny (potocznie „na papierze”) posługując się odpowiednimi modułami.
Nasz projekt 3d podnośnika przeanalizuje te moduły pod kątem wytrzymałości (analiza MES) bądź dynamiki i kinematyki (symulacja dynamiczna).
Jeśli wszystko się zgadza mamy jeszcze większe przekonanie o tym, że projekt podnośnika śrubowego w rzeczywistości spełni stawiane przed nim zadania.

Przygotowanie dokumentacji techniczno – ruchowej – w końcowym etapie tworzy się projekt 2d podnośnika śrubowego. To tutaj umieszcza się wszystkie obliczenia, parametry, współczynniki, symulacje i ich wyniki oraz model 3d na kartkach papieru tak, aby wszystko było w jednym miejscu.
Takie dokumentacje służą do wytworzenia projektu w rzeczywistości. W praktyce dobrze przygotowana dokumentacja rysunkowa to taka, którą bez problemu odczytają inżynierowie dowolnej firmy produkcyjnej (oczywiście posiadającej odpowiedni park maszynowy).
Etap 1 – analiza geometryczna
Jak rozpocząć projektowanie podnośników śrubowych? Jak w większości przypadków – od pewnych założeń projektowych, które pozwolą tak naprawdę rozpocząć pracę nad etapem pierwszym. Najczęściej zakłada się maksymalny i minimalny kąt między wybranymi ramionami podnośnika.
Znając wysokość podnoszenia, można określić nieznane długości stałe oraz te zmienne w czasie, występujące w chwili maksymalnego położenia i minimalnego oraz co najważniejsze – rozstaw śruby dla tych dwóch położeń krańcowych.
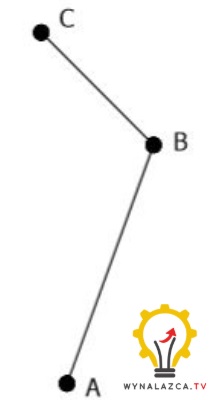
Brzmi skomplikowanie? Wcale takie nie musi być, wystarczy znać proste zasady matematyki, trochę trygonometrii i gotowe. Może wytłumaczę ten proces na przykładzie. Popatrz – mamy taki schemat podnośnika jak poniżej

Konstrukcja podnośnika składa się z ramion o długościach bazujących na parametrze a. Mamy zaznaczone również ważne kąty 𝛼 oraz 𝛽 i rozstaw śruby 𝑑. Rysunek powyżej przedstawia podnośnik w położeniu maksymalnym. Mając dobrze narysowany schemat, można zacząć analizować sytuacje.
Pierwsze co należy zrobić, to zorientować się, które długości mamy, których nie mamy oraz, które z nich są stałe, które zmienne w czasie. Co rozumiem przez pojęcie „zmienne w czasie”? Popatrz na długość 𝑑. W pozycji maksymalnej wysokości rozstaw jest taki jak na rysunku po lewej stronie. Natomiast obniżenie podnośnika spowoduję, że rozstaw ten się rozszerzy, a zatem w minimalnej pozycji długość 𝑑 będzie już inna, znacznie dłuższa (rysunek po prawej).
To sprawia, że długość jest zmienna w czasie i bardzo wygodnie jest taką informację zapisać jako:

Fachowo mówi się, że długość 𝑑 jest funkcją czasu. Taką samą długością (zmienną w czasie) jest wysokość ℎ. Rozważając dwie skrajne pozycje podnośnika (maksymalna i minimalną) polecam rozłożyć ten wymiar na: ℎ𝑚𝑎𝑥 odpowiadające wysokości w położeniu maksymalnym oraz analogicznie – ℎ𝑚𝑖𝑛 dla położenia minimalnego. Podobnie zmienne w czasie są kąty 𝛼 i 𝛽.
Analiza geometryczna – obliczenia nieznanych długości
Skoro już wiesz, jak się zmienia konstrukcja podczas ruchu podnośnika, możesz przejść do obliczeń nieznanych długości. W tym celu proponuję założyć najważniejszą rzecz – wartość kątów dla maksymalnego i minimalnego położenia. Jeśli nie znasz wartości wysokości dla maksymalnego położenia i minimalnego to również należy je założyć. Z reguły są to dane, które dostaje się od zleceniodawcy projektu podnośnika podnoszącego dany ciężar na daną wysokość. Dzięki temu tak naprawdę otwiera się droga do projektowania.
Pamiętaj, że jeśli będziesz miał już na tym etapie jakiekolwiek problemy – możesz umówić się z nami na konsultację lub zlecić projekt podnośnika. Napisz na kontakt@wynalazca.tv.
Jak znasz kąty to możesz w prosty sposób z trygonometrii wyliczyć nieznane długości dochodząc do rozstawu śruby 𝑑. Obliczenia należy przeprowadzić dla dwóch skrajnych położeń podnośnika. To bardzo ważne w kontekście określenia w dalszym etapie, którą siłę brać do analizy wytrzymałościowej.

Etap 2 – analiza rozkładu sił
Aby przejść do tego etapu musisz już znać długości stałe wszystkich ramion wchodzących w skład podnośnika oraz długości zmienne w czasie dla skrajnych położeń. Oczywiście – potrzebne będą również wartości kluczowych kątów dla minimalnego i maksymalnego położenia.
Analiza rozkładu sił jest etapem, w których poznajemy reakcje działające na ramiona oraz co jest najważniejsze – reakcje działającą na śrubę na kierunku jej osi. Oczywiście te dane należy wyznaczyć dla dwóch skrajnych położeń podnośnika. Są to informacje, bez których dalsze działania nie mają sensu i są niewykonalne.
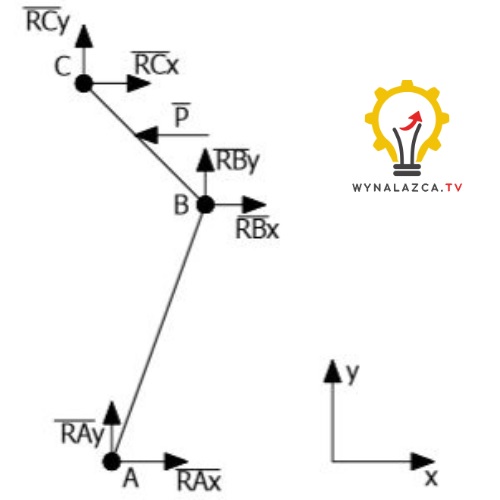
Aby dobrze określić siły reakcji w projektowanym podnośniku śrubowym, należy sugerować się zasadami statyki. Najczęściej konstrukcję stanowi zespół prętów (ramion) połączonych przegubowo, a podstawą jest podpora obrotowa. Taki przypadek jest w przykładzie przedstawionym w tym artykule.
Punkty B, C, D, E są punktami przegubów, a punkt A jest podporą obrotową. Wyznaczenie sił reakcji dla takich konstrukcji wymaga tak naprawdę znajomości zasady statyki, która mówi o tym, że kiedy pręt jest ustrojem jednowymiarowym, tzn. można pominąć jego masę i kiedy nim nie może być i wówczas należy jego masę uwzględnić. Oczywiście obydwa przypadki wiążą się z tym, że inaczej określa się siły reakcji. Przedstawię to na przykładzie.

Aby pręt był ustrojem jednowymiarowym, muszą być spełnione warunki takie jak:
- oś musi być linią prostą,
- wzdłuż jego osi nie działają żadne siły,
- wchodzi w kontakt mechaniczny przegubowo na obu swoich końcach.
Zasada analizy konstrukcji podnośnika i rozkład sił
Jeśli powyższe warunki są spełnione, pręt traktuje się jako ustrój jednowymiarowy, a tytułowym jedynym wymiarem jest jego długość (pomijamy masę). Wówczas przyjmuje się siły reakcji tak, jak na rysunku po lewej, czyli siła działa na kierunku jego osi. W punkcie przegubu siła ciężaru rozkłada się na każdy pręt osobno. Jeśli jednak pręt nie traktuje się jako ustrój jednowymiarowy, to wówczas punkt przegubu należy rozpatrywać jako podporę obrotową, w której są dwie reakcje składowe, rozłożone na kierunkach przyjętego układu współrzędnych. Siła reakcji jest wypadkową tych dwóch sił składowych. Pokazano to na rysunku po prawej.
Według tej zasady należy przeanalizować konstrukcje podnośnika i rozkład sił na poszczególnych elementach. Zaleca się wyznaczenie wszystkiego, czego się da, jak najwięcej reakcji, tak aby poznać, jak najwięcej informacji o siłach działających w projektowanym podnośniku. Mając te dane, możesz w późniejszym etapie wyznaczyć odpowiednie gabaryty prętów, średnice sworzni oraz innych elementów wchodzących w skład Twojego projektu, które zarazem zagwarantują wytrzymałość konstrukcji.
Etap 3 – obliczenia wytrzymałościowe
Etap 3 jest momentem, w którym tak naprawdę określa się wszystko, co jest potrzebne do zaprojektowania podnośnika śrubowego.
Zaczyna się w momencie, gdy znasz siły reakcji działające na oś śruby w dwóch skrajnych położeniach. Do dalszej analizy należy wybrać tę większą wartość. Z uwagi na fakt, że etap 3 jest bardziej skomplikowany i składa się on z kilku ważnych części. Podzielę go na:
- wyznaczenie dopuszczalnych naprężeń na rozciąganie / ściskanie
- określenie średnicy śruby z warunku wytrzymałościowego na rozciąganie,
- wybór gwintu
- obliczenie przekroju poprzecznego dla wybranego gwintu
- sprawdzenie warunku na samohamowność
- określenie momentu skręcającego na gwincie,
- sprawdzenie warunku wytrzymałościowego dla śruby napędowej
- obliczenie wysokości nakrętki
- obliczenie ilości zwojów na nakrętce
Wyznaczenie dopuszczalnych naprężeń na rozciąganie / ściskanie
Siła działająca na oś śruby, którą wyznaczyłeś we wcześniejszym etapie działa na tą śrubę rozciągając ją albo ściskając. Zależy to od zwrotu wektora tej siły. Pokazałem to na rysunku obok.
Aby wyznaczyć dopuszczalne naprężenia na rozciąganie bądź ściskanie należy wybrać wstępny materiał na śrubę i podać dla tego materiału granicę plastyczności 𝑅𝑒.

Do tego trzeba zdefiniować współczynnik bezpieczeństwa, który gwarantuje to, że nasze wyniki obliczeń w 100% będą wystarczalne. Wówczas dopuszczalne naprężenia na rozciąganie bądź ściskanie są wynikiem ilorazu granicy plastyczności ze współczynnikiem bezpieczeństwa, co możemy zapisać jako:

Przy czym:
𝑘𝑟𝑐 – dopuszczalne naprężenia na rozciąganie / ściskanie
Określenie średnicy śruby z warunku wytrzymałościowego na rozciąganie
W celu określeniu średnicy śruby musisz skorzystać z warunku wytrzymałościowego na rozciąganie bądź ściskanie śruby. Mówi on, że siła podzielona przez pole powierzchni przekroju poprzecznego tej śruby powinna być mniejsza bądź równa wyznaczonym wcześniej dopuszczalnym naprężeniom. Nierówność ta ma postać:

𝜎𝑟 – naprężenia rozciągające / ściskające (w zależności od znaku siły osiowej działającej na
śrubę),
𝐴 – pole powierzchni przekroju osiowego
𝑆 – siłą osiowa działająca na śrubę
Z powyższej nierówności możesz wyznaczyć średnicę minimalną, która spełnia tę nierówność, znając siłę osiową i wartość dopuszczalnych naprężeń na rozciąganie / ściskanie. Musisz też wiedzieć, czy śruba jest poddana działaniu sił rozciągających bądź ściskających, czy jest obciążona również siłą zginającą. Wówczas musisz brać pod uwagę analizę wytrzymałościową na zginanie.
Wybór gwintu
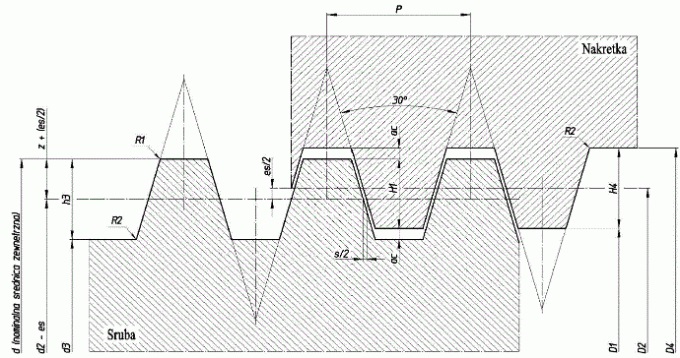
Znając już minimalną średnicę śruby otrzymaną z warunku, możesz przejść do doboru gwintu znormalizowanego. W tym celu należy wybrać gwint (najczęściej trapezowy) o średnicy większej od tej minimalnej (wyznaczonej wcześniej z nierówności) bądź w ekstremalnych przypadkach równej minimalnej. Następnie musisz spisać wszystkie parametry tego gwintu np. podziałkę czy średnice cząstkowe. Możesz się posłużyć tego typu rysunkami:
Obliczenie pola powierzchni przekroju poprzecznego dla wybranego gwintu na śrubie
Po wyborze gwintu na śrubę należy obliczyć pole powierzchni przekroju poprzecznego. Nie trudno się domyślić, że przekrój ten będzie miał kształt koła. Do wzoru na to pole należy brać pod uwagę średnicę zewnętrzną śruby.


Mechanizmy śrubowe mają pewną własność, która nazywa się samohamownością gwintu. Jest to w większości przypadków kluczowa kwestia i tak też jest w podnośnikach śrubowych. Po spełnieniu pewnego warunku połączenie śrubowe jest samohamowne, co można tłumaczyć jako blokadę obrotu śruby pod wpływem działania sił osiowych obciążających. W takiej sytuacji obrót śruby jest możliwy tylko wtedy, gdy w sposób zewnętrzny obrócimy śrubę, ręcznie lub za pomocą układu napędowego oraz wtedy, gdy po obrocie nakrętki zostanie ona przesunięta.
Sprawdzenie warunku samohamowności śruby podnośnika śrubowego
Taka własność jest bardzo ważna dla projektowania podnośników śrubowych i warunek na samohamowność musi być spełniony. Zabezpiecza on przed posuwem nakrętki, na którą oddziałuje siła ciężkości podnoszonego elementu. Warunek samohamowności gwintu jest prosty – kąt pochylenia linii śrubowej musi być mniejszy od pozornego kąta tarcia. Skąd on się bierze? Zobacz na poniższą ilustrację.

Widzisz, jak wygląda rozkład sił podczas współpracy nakrętki ze śrubą napędową. Siły, jakie wówczas występują to:
N – siła reakcji nacisku nakrętki na pole boczne śruby,
T – tarcie pomiędzy elementami,
S – siła reakcji pochodzącą od ciężaru mechanizmu,
M – siła obwodowa pochodząca od napędu mechanizmu,
Przedstawiono również wektor R, który wyznacza oś, względem której jest mierzony pozorny kąt tarcia. Warunek samohamowności powstaje z analizy geometrycznej podnoszenia i opuszczania nakrętki wzdłuż osi śruby. Wynika z tej analizy to, że dla warunku:

Śruba jest samohamowna.
Pewnie zastanawiasz się skąd wziąć wartości tych kątów? Służę pomocą. Kąt pochylenia linii śrubowej 𝛾 zapisujemy jako:

Przy czym:
𝛾 – kąt pochylenia linii śrubowej,
𝑃 – podziałka wybranego gwintu,
𝑑2 – średnica podziałowa dla wybranego gwintu
Natomiast pozorny kąt tarcia wylicza się ze wzoru na jego tangens:
Przy czym:
𝜌 – pozorny kąt tarcia,
𝜇 – współczynnik tarcia. Zależy on od rodzajów materiałów stykających się (czyli śruby i nakrętki).
𝛼 – kąt zarysu dla wybranego rodzaju gwintu
Mając te dane, można sprawdzić warunek samohamowności śruby. W przypadku, gdy warunek nie jest spełniony, najkorzystniej jest wybrać inny gwint na taki, dla którego ten warunek jest spełniony.
Obliczenie momentu skręcającego
W tym podpunkcie należy określić wymagany moment skręcający, który umożliwia podnoszenie ciężaru w przypadku projektowania podnośników śrubowych. Moment osiągany przez silnik powinien być równy bądź większy niż ten, który otrzymasz w obliczeniach.
Obliczając moment skręcający, należy uwzględnić momenty tarcia powstające na powierzchniach gwintu oraz ewentualny moment tarcia między nakrętką a przedmiotem, w którym jest ona osadzona. Ten drugi jest czasami pomijany w zależności od tego, jaką konstrukcje ma podnośnik. Wówczas zależność będzie wyglądać następująco:

Obliczenie momentu zginającego
Jeżeli projektowany przez Ciebie mechanizm śrubowy jest poddany działaniom sił zginających śrubę, to wówczas należy również poświęcić jeden podpunkt na obliczenie momentu zginającego śrubę. Przeważnie moment gnący powstaje, gdy mechanizm śrubowy jest napędzany korbą w sposób ręczny, co jest klasycznym rozwiązaniem w przypadku podnośników śrubowych. Wówczas moment zginający powstaje przez iloczyn siły działającej na korbę i ramie tej korby:

Przy czym,
𝑃𝑟 – siła działająca na korbę,
𝑙 – ramie korby
Sprawdzenie warunku wytrzymałościowego złożonego dla śruby napędowej
Bardzo często analiza wytrzymałościowa dla mechanizmów, która uwzględnia tylko podstawowe warunku wytrzymałościowe, jest niewystarczająca. Tak też jest w przypadku podnośników śrubowych, w których śruba najczęściej działa na ściskanie lub rozciąganie wraz ze skręcaniem i zginaniem.
Dlatego też należy obliczenia podsumować złożonym warunkiem wytrzymałościowym dla śruby napędowej, którego postać przyjmuje się według głównego rodzaju naprężeń, czyli takich, które najbardziej oddziałują na mechanizm. W przypadku, gdy bardziej znaczące są siły skręcające, warunek ten wygląda następująco:

Przy czym,
𝜎𝑧 – naprężenia złożone,
𝑊𝑧 – wskaźnik wytrzymałościowy na zginanie dla danego przekroju poprzecznego
𝑊𝑜 – wskaźnik wytrzymałościowy na skręcanie dla danego przekroju poprzecznego
Jak widzisz do określenia tego warunku, są potrzebne praktycznie wszystkie wyniki, które uzyskałeś w poprzednich punktach oraz wskaźniki wytrzymałościowe dla danego rodzaju obciążenia dla przekroju poprzecznego kołowego. Jeśli warunek jest spełniony, to wówczas masz pewność, że śruba napędowa będzie spełniać Twoje wymagania w sposób prawidłowy.

Obliczenia wysokości nakrętki
Mając już kompletne obliczenia dotyczące śruby, tj. spełniony złożony warunek wytrzymałościowy można wyznaczyć wysokość nakrętki.
Aby ją wyznaczyć dla mechanizmu śrubowego, głównie stosuje się warunek na naciski dopuszczalne i przekształca się go tak, aby wyznaczyć z tego wysokość.

Przy czym:
𝑃𝑑𝑜𝑝 – naciski dopuszczalne
𝐻 – wysokość nakrętki
𝐷1 – średnica zewnętrzna wybranego gwintu
Naciski dopuszczalne, które występują w tym warunku, można przyjąć jako 15% dopuszczalnych naprężeń na rozciąganie, dzięki czemu w nierówności pozostaje tylko jedna niewiadoma.
Etap 4 – projektowanie techniczne 3d
Jak już zostało wspomniane w tej części, przechodzimy już do korzystania z naszych wyników w celu zaprojektowania podnośnika 3d. Co to znaczy?
Stworzenie w przestrzeni wirtualnej modelu 3d naszego podnośnika śrubowego. (Jeśli nie wiesz jak stworzyć model 3D swojego projektu, zapraszam do kontaktu z nami: kontakt@wynalazca.tv.). Tworzony model 3D powinien mieć jak najwięcej cech, które już zdefiniowaliśmy jak np. schemat kinematyczny bądź wybrany rodzaj i gabaryty gwintu.
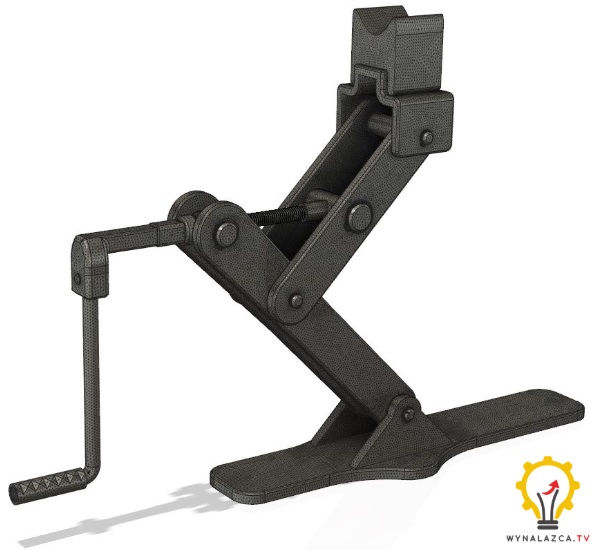
Poniżej załączam Ci przykładowy model 3D podnośnika śrubowego:

Projektowanie techniczne 3d – programy typu CAD
Jak widzisz, model jest tak zaprojektowany, aby w jak największym stopniu odzwierciedlał to, co ma zostać wykonane w rzeczywistości. Model 3D podnośnika śrubowego należy zrobić w taki sposób, aby uwzględniać wszystkie elementy znormalizowane potrzebne do jego wykonania, połączenia śrubowe, sworzniowe i tym podobne.
Wspomniałem wcześniej, że najwygodniej jest projektować swój podnośnik w programach typu CAD w module pozwalającym na tworzenie złożeń. Może zastanawiasz się, co to jest? Programy CAD to środowiska przeznaczone do projektowania inżynieryjnego maszyn.
Zwróć uwagę na zdjęcie modelu 3D podnośnika w tym artykule. Przedstawia on złożenie, czyli zespół belek, kształtowników, śruby, nakrętki i innych. Pomiędzy tymi elementami są zdefiniowane odpowiednie wiązania bądź połączenia, które są odzwierciedleniem rzeczywistych połączeń i wówczas w ten sposób możemy przedstawić w przestrzeni wirtualnej podnośnik, tak jakby był on wykonany „na żywo”.
W ramach rozjaśnienia tej funkcjonalności posłużę się przykładem. Zobacz na poniższe zdjęcie:

W tym miejscu jest sworzeń i dwa kształtowniki, które ma on połączyć. Takie połączenie pozwala na swobodny obrót tych dwóch kształtowników wokół osi sworznia. W rzeczywistości na pewno wiesz, jak jest to zmontowane. Osadzasz kształtowniki na osi sworznia, a następnie z drugiej strony je blokujesz wybranym sposobem, np. za pomocą pierścienia sprężynującego.
Jak to zrobić w środowisku CAD? Proszę bardzo. Wiązanie łączące dwie osie to tak naprawdę czynność osadzania kształtownika na oś sworzni w przestrzeni wirtualnej.

Wybierasz oś otworu w kształtowniku, następnie oś sworznia, zatwierdzasz i gotowe. Tak się właśnie buduje zespoły. Oczywiście, wcześniej należy mieć zdefiniowane już poszczególne części. Do tego służą narzędzia modelowania programów CAD i Twoje wcześniejsze obliczenia.
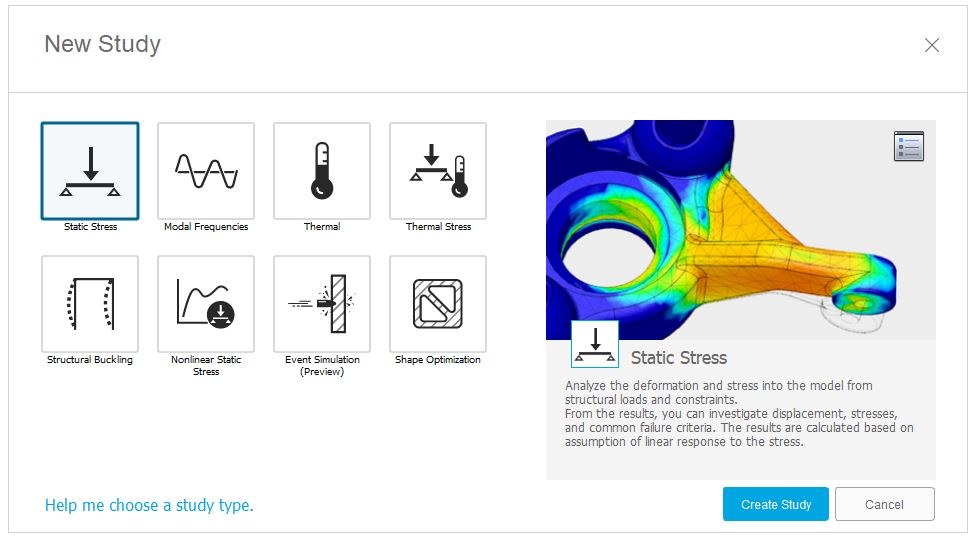
Etap 5 – analiza MES i symulacje kinematyczno-dynamiczne
Etap kolejny, dość istotny i na pewno bardzo potrzebny, gdy podnośnik ma być wykonany w rzeczywistości. W tej części zaprojektowany już model podnośnika śrubowego poddajesz analizie wytrzymałościowej MES (metoda elementów skończonych) bądź (lub) symulacji kinematyczno-dynamicznej.
Analiza MES
Analiza MES (Metoda Elementów Skończonych) to zaawansowana metoda rozwiązywania układów równań różniczkowych.
W tej analizie program w sposób numeryczny sprawdza Twój projekt pod kątem wytrzymałości.
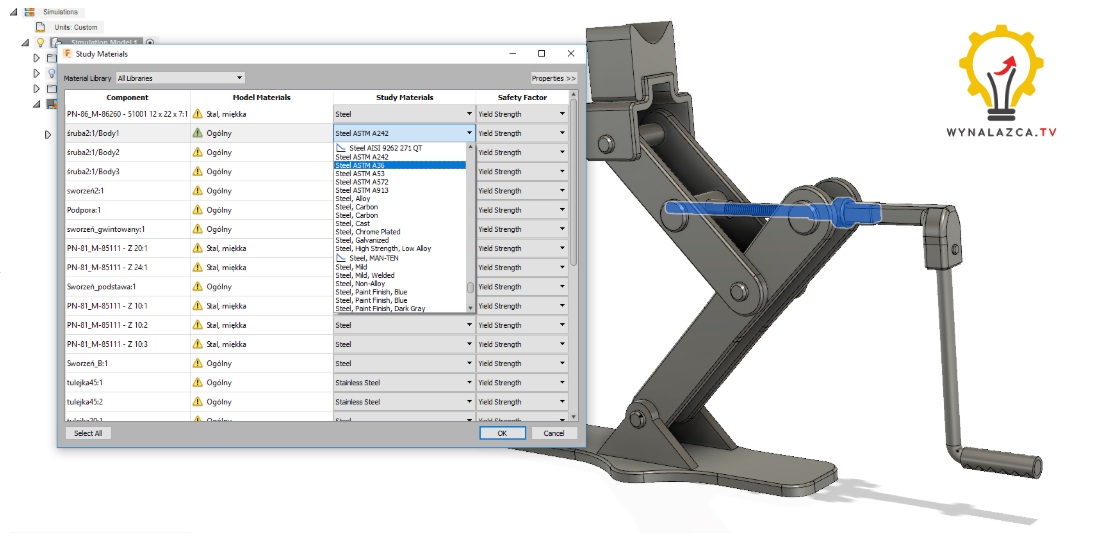
Co należy zrobić, aby wykonać taką analizę?
Przede wszystkim należy zdefiniować materiały i ich dane w środowisku CAD.
Materiały te powinny pokrywać się z tymi, których dane wykorzystywałeś do obliczeń we wcześniejszych etapach.
Następnie należy zdefiniować relacje bądź połączenia pomiędzy poszczególnymi elementami Twojego projektu. Należy wstawić je w taki sposób, aby odzwierciedlały one Twoje złożenie i faktyczne wiązania w złożeniu. Przykładowo: w miejscu połączenia sworzniowego należy zdefiniować właśnie wiązanie sworzniowe w module analizy MES.
Kolejnym krokiem jest definicja obciążeń, na których działanie Twój podnośnik śrubowy jest narażony. Obciążenia te należy wprowadzić tak, aby pokrywały się z obciążeniami, które brałeś pod uwagę podczas obliczeń we wcześniejszych etapach. Mam tu głównie na myśli siłę osiową działającą na śrubę napędową, bądź maksymalny ciężar, jaki ma podnosić podnośnik.
Oczywiście jedno jest uzależnione od drugiego, dlatego wystarczy wybrać jedną z nich i wprowadzić do programu. Następnie, należy narzucić siatkę na model, czytaj punkty, dla których mają być wykonywane numeryczne obliczenia. Im ich jest więcej, tym dokładniejsza jest nasza analiza. Jak wygląda siatka? Zobacz:
Analiza MES i czas trwania symulacji
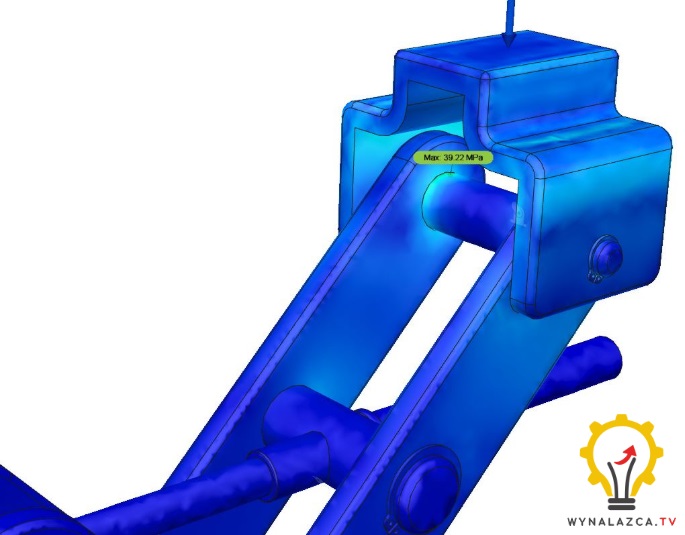
Na załączonym obrazie siatka jest dość szczegółowa, a co za tym idzie, posiada sporą ilość punktów do rozwiązania, co oczywiście ma wpływ na czas trwania symulacji. Mniej punktów może powodować, że zostanie pominięty obszar, w którym występują bardzo duże naprężenia. Z tego powodu, należy odpowiednio zdefiniować parametry siatki według tego, co jest dla nas ważniejszym priorytetem – długość analizy, czy jej szczegółowość.

W tym miejscu można rozpocząć już wspomniane obliczenia numeryczne. Wyniki są najczęściej przedstawione w formie raportu, w którym są wykresy i dane odpowiadające naprężeniom i siłom reakcji w danych kształtownikach i podzespołach Twojego podnośnika śrubowego. Wyniki te powinny dawać takie wartości, jakie otrzymałeś w swojej analizie. Jeśli tak jest – to na pewno Twój podnośnik podoła stawianym zadaniom.
Symulacja kinematyczno – dynamiczna dla podnośnika śrubowego
W tej części możesz przeprowadzić symulację tego, jak zachowuje się Twoje złożenie w warunkach przybliżonych do warunków rzeczywistych. Co mam na myśli? Np. ruch podnośnika śrubowego, w których program uwzględnia opory ruchu występujące przez współpracę podzespołów, opory powietrza, czy też siłę grawitacji.
Można się zapytać, dlaczego jest to symulacja kinematyczno-dynamiczna, jeśli mówię tylko o siłach. Albowiem symulacje działają na zasadach zadań: dynamiki i dynamiki odwrotnej obecnych w robotyce. Można to bardzo uprościć w ten sposób: jeśli definiujesz kinematykę – w odpowiedzi uzyskujesz dynamikę i odwrotnie.
Definicja kinematyki to nic innego jak zadanie naszemu badanemu mechanizmowi (w naszym przypadku będzie to podnośnik śrubowy) ruchu, a raczej trajektorii ruchu, jaki ma wykonać model. Podnośnik śrubowy oczywiście nie jest skomplikowanym mechanizmem i jego stopnie swobody są bardzo ograniczone. Taką trajektorią może być, chociażby ruch platformy podnoszenia od dolnej granicy wysokości (ℎ𝑚𝑖𝑛) do górnej granicy (ℎ𝑚𝑎𝑥) z uwzględnieniem ciężaru podnoszenia.
Wówczas w programie jest to tak traktowane, że podczas realizowania zadanej trajektorii dobierany jest potrzebny moment, który gwarantuje właśnie ten zadany ruch. Zatem, w tym przypadku otrzymujemy informacje „z jaką siłą kręcić podnośnik by on podnosił maksymalny ciężar przez cały zakres ruchu”.
Symulacja działania podnośnika śrubowego – po co?
Informacje te są niezbędne, chociażby by dobrać układ napędowy do projektu bądź sprawdzić, czy będzie on spełniał wymagania. Jak wygląda symulacja w sposób odwrotny? Definiując właśnie moment napędowy, otrzymuje się w odpowiedzi ruch, jaki jest możliwy dla tego momentu.
Warto wspomnieć, że definicje danych w tych symulacjach mogą być stałe bądź zmienne w czasie. Szczególnie te zmienne w czasie jeszcze bardziej „urzeczywistniają” nasze badania, a dzięki temu można sprawdzić np. w jaki sposób reaguję podnośnik śrubowy na nagłą zmianę ciężaru.
Wszystkie wyniki w takich symulacjach otrzymuje się w formie wykresów, najczęściej w dziedzinie czasu. Dane te można eksportować do innych środowisk, np. do pakietu Microsoft Office, co często ułatwia przepływ dokumentów do poszczególnych podwykonawców poszczególnych części dla podnośnika śrubowego.
Etap 6 – dokumentacja techniczno-ruchowa
Końcowy etap, w którym tak naprawdę zbiera się wszystko, co zostało wykonane i umieszcza się to w jednym miejscu – na dokumentacji 2d podnośnika śrubowego.
Dokumentacja powinna mieć strukturę podobną do tej, którą omawiamy w tym artykule – począwszy od własnych obliczeń analitycznych, poprzez stworzenie projektu 3D i jego analizie oraz na dokumentacji technicznej skończywszy, w której model 3d prezentuje się w formie rysunków technicznych 2d.
Najważniejszą cecha tejże dokumentacji jest to, aby zawierała wszystkie informacje niezbędne do wykonania podnośnika śrubowego, który został zaprojektowany. Z tego powodu technolog, który otrzymuje taką dokumentację, nie powinien mieć problemów i pytań.
Podsumowanie – Jak projektować podnośniki śrubowe?
Mam nadzieję, że po przeczytaniu tego artykułu udało mi się przekazać wam odpowiednią wiedzę potrzebną do projektowania podnośników śrubowych. Już teraz prawdopodobnie jesteście w stanie stworzyć własny prototyp, ale jeśli nadal posiadacie jakieś pytania odnośnie do tego tematu bądź po prostu potrzebujecie konsultacji lub chcecie zlecić nam wykonanie obliczeń i projektu – zapraszam na kontakt do naszego biura: kontakt@wynalazca.tv.
Redagował, współautor: mgr inż. Dawid Pjanka “Vinci”

Naszym celem jest ułatwienie procesu komercjalizacji innowacyjnych rozwiązań, dlatego oferujemy kompleksowe wsparcie, w tym konsultacje, badania patentowe, tworzenie prototypów oraz pomoc w ochronie wzorów przemysłowych i patentów.
Dzielimy się wiedzą poprzez wykłady, prelekcje, ebooki, kursy online i treści w social media. W przystępny sposób edukujemy o ochronie własności intelektualnej i pokazujemy, jak skutecznie realizować innowacyjne projekty. Wynalazca TV to miejsce, gdzie innowacja spotyka się z wiedzą i wsparciem na każdym kroku.
- Poradnik dla wynalazców: Jak sprawdzić swój pomysł na produkt – analiza prawna - 8 października 2024
- Jak sprawdzić swój pomysł na produkt? – analiza finansowa – Poradnik dla wynalazców - 10 września 2024
- Nowe procesory w 2023 roku – czym zaskoczy nas AMD i Intel? - 19 marca 2023
Literatura:
Kurmaz L. – Projektowanie węzłów i części maszyn
Wiesław O. – Obróbka Skrawaniem
Techniki Przyrostowe – Druk – Drukarki 3D – Grzegorz Budzik
Świat druku 3D. Przewodnik – Anna Kaziunas France
AutoCad 2017/LT2017/360+. Kurs projektowania parametrycznego i nieparametrycznego 2D i 3D – Andrzej Jaskulski
Źródło grafik:
[1] https://www.ebmia.pl/sruby-trapezowe-kulowe-akcesoria-nakretki-c-196_45_1347.html
[2] https://pl.wikipedia.org/wiki/Przek%C5%82adnia_%C5%9Brubowa