Dobór siłownika hydraulicznego
Dobór siłowników hydraulicznych oraz obliczenia siłowników hydraulicznych zaczniemy od pytania retorycznego… Chciałbyś „przenosić góry”? Potrzebujesz użyć siły rzędu kilkudziesięciu ton? Tylko… Jak wygenerować takie siły? Na to pytanie odpowie nam… Hydraulika.
Zapraszam Cię do krótkiego poradnika, w którym dowiesz się, jak dobrać siłownik hydrauliczny oraz jak obliczyć siłowniki hydrauliczne. Czyli… jak to wszystko ogarnąć, żeby nie przedobrzyć i żeby nikomu się nic nie stało, hehe 😅
Dobór siłownika hydraulicznego – budowa, typy, zasada działania
Budowa i zasada działania siłownika hydraulicznego jednostronnego
Zacznijmy naszą przygodę z siłownikami hydraulicznymi od początku… Siłownik hydrauliczny to najprostszy rodzaj silnika hydraulicznego. W wielu źródłach mówi się, że jest to element wykonawczy zamieniający energię ciśnienia czynnika roboczego na energię mechaniczną w postaci ruchu liniowego lub obrotowego…
…co to dokładnie znaczy? Przecież nie każdy może rozumieć tę definicję. Spokojnie, popatrzmy więc na trywialny schemacik w postaci rys.1.

Jak możemy zauważyć, siłownik składa się głównie z cylindra 1, tłoka 2 oraz tłoczyska 3. Ważne – musimy rozróżniać tłok od tłoczyska, to dwa różne elementy. Ponadto, uwzględniono na rysunku również sprężynę 4, gwarantującą powrót tłoczyska siłownika. Takie rozwiązanie sprawia, że na rys.1 został pokazany siłownik jednostronnego działania, tzn. ruch sterowany następuje tylko w jednym kierunku, poprzez podanie ciśnienia do komory A. Natomiast powrót jest realizowany dzięki wspomnianej sprężynie.
No dobra, wiemy co jest co, ale jak to działa? Prosta sprawa – czynnik roboczy (np. ciecz hydrauliczna) z odpowiednim ciśnieniem dostaje się do wewnątrz cylindra przez komorę A. Następnie dzięki energii ciśnienia napiera ona na powierzchnie tłoka 2 wymuszając tym samym posuw liniowy x tłoczyska siłownika 3. Jak możemy sobie wyobrazić wtedy sprężyna się ściska. Po odłączeniu ciśnienia następuje powrót przez energię sprężyny, która „chce się rozciągnąć” do swojego stanu równowagi.
Budowa i zasada działania siłownika hydraulicznego dwustronnego
Kolejnym typem siłowników hydraulicznych są siłowniki dwustronnego działania. Sposób jego działania oczywiście pokażemy na rys.2.

Dobrze widzicie, nie ma już sprężyny, ale są za to dwie komory doprowadzające czynnik roboczy – A i B. Zasada działania jest praktycznie taka sama, z tą różnicą, że dzięki drugiemu wejściu B jest możliwość sterowania ruchem w drugą stronę. Stąd nazwa siłownik dwustronnego działania.
Znając już zasadę działania siłowników można zastanawiać się gdzie takie rozwiązanie ma zastosowanie? Oczywiście odpowiedzi trudnej nie ma – tam gdzie jest potrzeba użycia dużej siły. Przytoczę dla Was prosty przykład z życia wzięty. Popatrzmy.

Budownictwo, a dokładniej maszyny budowlane. W tym aspekcie nie ma co „grymasić”, trzeba oddziaływać dużymi siłami i to praktycznie cały czas. Siłowniki hydrauliczne świetnie się do tego nadają i znacznie polepszają standardy pracy na budowach. Na załączonym zdjęciu zaznaczyłem na niebiesko siłowniki hydrauliczne stanowiące napęd dla poszczególnych członów ramienia koparki. Urządzenie to pracuje w ciężkich warunkach, nic więc dziwnego, że potrzebuje napędów z grubego arsenału.
Natomiast dla tych co mają słabą wyobraźnie, przygotowaliśmy krótką animację pokazującą zasadę działania takich siłowników hydraulicznych:
Rodzaje siłowników hydraulicznych
W przemyśle są dostępne również siłowniki dwustronnego działania z obustronnym tłoczyskiem, czyli jak można się domyślić, tłoczysko 3 jest też po drugiej stronie siłownika oraz wersje z wieloma tłokami, czyli siłowniki wielotłokowe.

Kolejnym rodzajem siłowników hydraulicznych, o którym powinniśmy sobie wspomnieć to siłowniki teleskopowe, które są wyposażone w dodatkowy teleskop (coś w stylu drugiego cylindra) nałożonego bezpośrednio na tłoczysko. Całość jest zamontowana w środku głównego nieruchomego cylindra.

Innym dość często spotykanym typem siłowników hydraulicznych są siłowniki nurnikowe, w których tłoczysko jest nieruchome, przy czym za pośrednictwem działania ciśnienia cieczy hydraulicznej przesuwa się cylinder.
Istnieją też siłowniki hydrauliczne obrotowe, które zamieniają energię cieczy hydraulicznej na ruch obrotowy. Takie siłowniki dostępne są w konfiguracji pełnego obrotu, bądź ograniczonego.

Dobór siłownika hydraulicznego
Jaki wybrać typ siłownika hydraulicznego
Orientując się już mniej więcej jakie są typy siłowników i jak działają możemy przejść do tego, jak dobierać siłownik. Oczywiście, pierwsze co wypada zrobić to określić jaki dokładnie rodzaj siłownika jest nam potrzebny.
Na początku musimy zdefiniować, czy w danym projekcie konstruowanego schematu hydraulicznego lub maszyny wykorzystującej hydraulikę potrzebny jest ruch prostoliniowy, czy może obrotowy?
Jeśli już wiemy, że projektowany przez nas automat wymaga zastosowania siłownika liniowego, to musimy zastanowić się, czy potrzebny jest ruch sterowany tylko w jedną stronę, w dwóch, czy może obustronny?
itd. … itd. …
Lecimy po kolei… 🙂
Dobór siłownika jednostronnego działania
Załóżmy, że chcemy skonstruować maszynę hydrauliczną (automat) przenoszącą obiekt z punktu A do punktu B. Jej zasadę działania przedstawia rysunek poniżej:
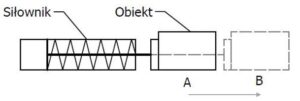
Zadaniem siłownika hydraulicznego jest tylko przetransportowanie obiektu z położenia A do położenia B (Omawiamy systemy hydrauliczne, wiec zakładamy, że obiekt ma dość znaczącą masę, co wymaga zastosowania hydrauliki). Po zrealizowaniu tego zadania, obiekt w nowym położeniu ma pozostać na jakiś czas, a nasz siłownik może swobodnie wrócić do położenia początkowego, czyli wsunąć z powrotem swoje tłoczysko. Obiekt w położeniu B może być dalej obrabiany, po czym następuje jego dalszy transport, ale już za pomocą innego napędu. Zwalnia się miejsce i cykl pracy może rozpocząć się od nowa. W takim systemie do realizacji samego transportu z A do B można zastosować siłownik jednostronnego działania. Jest to rozwiązanie tańsze i prostsze, gdyż upraszcza to znacznie cały układ hydrauliczny sterujący taką linią produkcyjną.
A oto kilka przypadków, w których również można zastosować siłowniki jednostronnego działania:
- naklejanie,
- utrzymywanie pozycji podczas różnych operacji przez inne napędy,
- włączanie/wyłączanie poszczególnych etapów w procesach technologicznych / liniach produkcyjnych
Dobór siłownika dwustronnego działania
Załóżmy jednak, że cyklem pracy naszej maszyny hydraulicznej (automatu) jest przetransportowanie obiektu z położenia A do B, przytrzymanie i następnie powrót z położenia B do A.
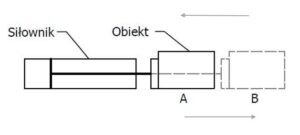
W takim wypadku zaleca się stosowanie siłownika dwustronnego działania, który gwarantuję odpowiednią siłę pchającą i powrotną oraz prędkość posuwu w obydwu kierunkach. Inne przypadki zastosowania takiego typu siłowników to:
- transport głowicy np. do wiercenia otworów,
- napęd do pras hydraulicznych,
- podnoszenie i opuszczanie elementów.
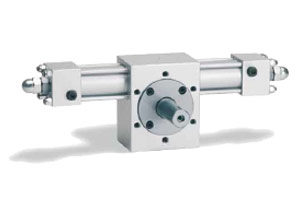
Dobór siłownika dwustronnego działania z obustronnym tłoczyskiem
Jeżeli w naszym przykładzie założymy, że chcemy transportować dwa obiekty o tą samą odległość, w tych samych kierunkach, lecz po różnych – przeciwległych stronach to idealnym rozwiązaniem jest zastosowanie siłownika hydraulicznego z obustronnym tłoczyskiem.

Warto zauważyć, że w czasie działania takiego siłownika, gdy obiekt (1) znajduje się w położeniu maksymalnego wsunięcia tłoczyska, to obiekt (2) znajduje się w położeniu maksymalnego wysunięcia przeciwległego tłoczyska. Podobna zależność zachodzi w drugą stronę tj., gdy obiekt (1) znajduje się w położeniu maksymalnego wysunięcia tłoczyska, to obiekt (2) znajduje się w położeniu maksymalnego wsunięcia przeciwległego tłoczyska.
Dobór siłowników teleskopowych
Jednym z parametrów siłowników hydraulicznych jest tzw. skok roboczy siłownika hydraulicznego. Skok ten jest to maksymalna odległość na jaką może wsunąć / wysunąć się tłoczysko. Jeśli projektowany mechanizm musi przenosić obiekty na dłuższe odległości, większe niż pozwalają na to standardowe zakresy siłowników hydraulicznych to wówczas należy dobrać siłownik teleskopowy. Siłownik teleskopowy zawiera jakby w sobie kilka wbudowanych w siebie tłoków, które w czasie działania siłownika hydraulicznego wysuwają się kolejno po sobie. Wadą tych siłowników jest m.in mniejsza wytrzymałość tłoka.
Dobór siłowników obrotowych
W takim przypadku, gdy nasza maszyna hydrauliczna potrzebuje podzespołu, który się obraca względem swojej osi (występuje ruch obrotowy), przy czym od zespołu tego wymaga się bardzo dużej mocy (znacząca wartość momentu siły) to powinniśmy użyć tzw. siłowników hydraulicznych obrotowych. Na początku warto określić, czy projektowany mechanizm hydrauliczny wymaga pełnego zakresu obrotów, czy niepełnego zakresu obrotów (tzw. ograniczmy kąt obrotu). Jeśli zależy nam na pełnym zakresie obrotów to należy wybrać siłowniki obrotowe z pełnym zakresem obrotów. Jeśli jednak wymaga się zastosowania ruchu obrotowego o ograniczonym kącie obrotu to zaleca się wybrania siłowników wahadłowych o stałym przedziale kąta obrotu lub o zmiennym przedziale kąta obrotu – wówczas można zmieniać ograniczenia kąta obrotu (natomiast jest to dość kosztowna zabawka 🤑 ).
Dobór innych ciekawych siłowników…
Warto wspomnieć, że pomimo tego, że siłowniki są znane od bardzo dawna to cały czas są prowadzone prace nad ich doskonaleniem tak, aby spełniały coraz to większe standardy, szczególnie jeśli chodzi o poziom innowacyjności – popularne przy dotacjach (jako wynalazcy na zlecenie wiemy to z autopsji 😂 ). Ponadto siłowniki często występują jako podzespół innego wynalazku, czy wzoru użytkowego. Dobór tych specjalizowanych hydraulicznych urządzeń zależy od zastosowanej w nich mechaniki i zasady działania, dlatego też nie mogę Ci jednoznacznie powiedzieć na jakich zasadach możesz użyć innowacyjnego siłownika hydraulicznego. W takim przypadku powinieneś się zapoznać z jego dokładną specyfikacją.
![]()
Dobór parametrów siłowników
Niestety, w tym rozdziale muszę przytoczyć kilka wzorków 🤓. Wiem, mało kto to je lubi, ale niestety (lub 'stety’) w świecie inżynieryjnym matematyka jest podstawowym narzędziem do prognozowania zachowań oraz dobierania odpowiednich parametrów projektowanych przez nas maszyn. Dzięki obliczeniom możemy przewidzieć np. czy urządzenie będzie działać pod względem kinematyczno-dynamicznym, jakich powinniśmy użyć podzespołów do tego urządzenia, czy urządzenie wytrzyma zakładane obciążenia i spełnia tzw. założenia projektowe…
Dobierając wiec siłowniki nie możemy zaprzestać tylko na określeniu rodzaju, ale też należy co nie co przeliczyć, choćby przynajmniej dlatego by dobrze złożyć zamówienie na stronie producenta…
Obliczanie siły siłownika
Nie trudno jest się domyślić, że siłowniki o ruchu mechanicznym liniowym będą miały inne parametry niż te gwarantujące ruch obrotowy. W celu zrozumienia skąd te wszystkie wzorki, przeanalizujmy definicję ciśnienia. Ciśnienie to stosunek siły do powierzchni na którą ona działa. Z prawa Pascala wiemy, że ciśnienie w cieczy rozchodzi się równomiernie w całej objętości tej cieczy. Z tych dwóch informacji możemy wyprowadzić proste wzorki, określające najważniejsze parametry siłowników liniowych. Przytoczę jeszcze raz nasz schemacik 1.
Wiemy, że ciecz hydrauliczna pod ciśnieniem naciska na powierzchnie tłoka naszego siłownika. Z definicji wiemy też, że ciśnienie to stosunek tej siły do powierzchni na jaką ona działa. A więc, nie ma co myśleć, piszemy wzorek.

gdzie oczywiście p – ciśnienie hydrauliczne [Pa], F – siła działająca na powierzchnie [N] oraz S – pole powierzchni [m2].
Dobierając siłownik zazwyczaj na stronach producenta znajdziesz informacje dotyczące tzw. ciśnienia nominalnego (czyli ciśnienia do jakiego dostosowany jest siłownik hydrauliczny w trakcie jego pracy) oraz zakresu średnic tłoka. Na podstawie tych danych możemy określić z jaką siłą będziemy oddziaływać siłownikiem na dany obiekt,

gdzie Fs – siła generowana przez siłownik [N], SD – pole powierzchni tłoka [m2], Sd – pole powierzchni tłoczyska [m2]
Na podstawie powyższego wzoru można zauważyć, że siła działająca na tłok siłownika nie będzie taka sama, jak siła z jaką działa tłoczysko na obiekt – stąd więc zapis Fs . Różnica powierzchni tłoka i tłoczyska pojawia się stąd, że tak naprawdę siłę przenosi powierzchnia wokół tłoczyska, czyli powstający pierścień po odejmowaniu w/w powierzchni. Kształt powierzchni tłoka i tłoczysk zwykle jest okręgiem, dlatego teoż z geometrii wynika następująca zależność:
Ostatecznie po wstawieniu w/w wzorów na pola powierzchni mamy „przepis” 🤓 na siłę generowaną przez dobierany siłownik hydrauliczny :
Siła Fs to jest jeden z podstawowych parametrów, jaki może być potrzebny przy doborze siłownika do Waszych mechanizmów. Bazując na przeprowadzonych już obliczeniach, przy doborze siłowników mamy tak naprawdę dwie możliwości – albo znamy siłę jaką chcemy oddziaływać na obiekt i wyliczamy wymiary siłownika, albo znamy wymiary siłownika i chcemy sprawdzić jaką siłę generuje.
Dobór skoku siłownika
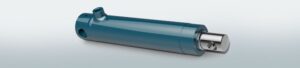
Kolejnym parametrem, który należy dobrać jest skok siłownika. Zwykle jest on podany przez producenta. Należy go jednak dobrać tak, aby siłownik hydrauliczny realizował zadanie jakie od niego wymagamy, a w przypadku jeśli żaden producent nie ma w swoim katalogu skoku, którego potrzebujemy to pamiętaj, że istnieje możliwość zamówienia specjalnego siłownika hydraulicznego – z drugiej strony jest to droższe rozwiązanie i dlatego zaleca się stosować siłowniki hydrauliczne o 'standardowych’ skokach. Przykładem takiego siłownika jest
Obliczenia prędkości wysuwu tłoczyska
Teraz przechodzimy do dynamiki… czyli prędkości przepływu cieczy hydraulicznej, która przekłada się na prędkość wysuwu tłoczyska siłownika. Zakładając, że pompę, która wytwarza dane ciśnienie p, o danej wydajności Q obliczyliście i dobraliście wcześniej to prędkość wysuwu wyliczamy z prostego wzorku (jak zawsze):

gdzie: Q – wydajność dobranej pompy, zwykle podana w [cm3/min] przez producenta, v – prędkość wysuwu tłoczyska w [cm/min]
Podsumowanie siłowników hydraulicznych
W tym artykule pokazałem Wam podstawy doboru siłowników hydraulicznych i jak widzicie… nie jest to takie skomplikowane. Pamiętaj, że dokładne wytyczne, dotyczące doboru siłownika hydraulicznego znajdziesz w katalogach producentów. Znajdziesz tam opisy krok po kroku co liczyć, jak liczyć, jak zinterpretować otrzymane wyniki. Pamiętaj, że jeśli sobie nie możesz poradzić to możesz do nas napisać: kontakt@wynalazca.tv, a pomożemy Ci rozwiązać inżynieryjny problem (inżynieria to nasza pasja 👍 ) .
Jeśli macie jeszcze jakieś pytania, może sugestie to zapraszam do sekcji komentarzy – chętnie odpowiem!
Redagował: mgr inż. Dawid Pjanka „Vinci”
Naszym celem jest ułatwienie procesu komercjalizacji innowacyjnych rozwiązań, dlatego oferujemy kompleksowe wsparcie, w tym konsultacje, badania patentowe, tworzenie prototypów oraz pomoc w ochronie wzorów przemysłowych i patentów.
Dzielimy się wiedzą poprzez wykłady, prelekcje, ebooki, kursy online i treści w social media. W przystępny sposób edukujemy o ochronie własności intelektualnej i pokazujemy, jak skutecznie realizować innowacyjne projekty. Wynalazca TV to miejsce, gdzie innowacja spotyka się z wiedzą i wsparciem na każdym kroku.
- Poradnik dla wynalazców: Jak sprawdzić swój pomysł na produkt – analiza prawna - 8 października 2024
- Jak sprawdzić swój pomysł na produkt? – analiza finansowa – Poradnik dla wynalazców - 10 września 2024
- Nowe procesory w 2023 roku – czym zaskoczy nas AMD i Intel? - 19 marca 2023
http://zhuamachinery.com
http://en.bicelli.it
http://zmadamczyk.republika.pl
http://www.amet.com.pl